
��ǿ�״����/������������ ������CPD-380H��Ʒ˵��
 �������ࣺGPS/DVD����
2013-7-30 10:49:31 �Ƽ�ָ����
�������ࣺGPS/DVD����
2013-7-30 10:49:31 �Ƽ�ָ����
����

����


����Ʒ������������ CONQUEROR
������Ʒ�ͺ�CPD-380H
������;���೬9������
������Ҫ������ SET: �����趨������Ҫ�ṩʹ���߸�����Ѷ��ѯ�빦������ѡ��
������ UP: �������ֵ����
������ DN: �������ֵ�ݼ�
������ MOD:�Խ�����������밲ȫ��ʻ(����)/����ϵͳ(����)ģʽѡ���
�������������300mA
���������ѹDC12~24V
���������ض�-25��~75��
����������ַhttp://conqueror.gpscamera.org/
����������������й��غ� (V60xx)
��������� (V50xx)
������������ģʽ���������ӵ��ԣ������������ɽ�������ģʽ
��������ʱ��2012��11��
��������ʱ��(��)1��
�������ع�����ҳ
������ ���ܼ��
������ X.K.NK.KA.VG-2.LASER
������ ���������������
������ ��ǿ�״����
������ ������������������˫�����꣬���ɴ�256��
������ �����������
������ ������������
������ ��γ����ѯ������ʱ���ѯ����ƿ��ѹ��ѯ��ϵͳ���²�ѯ
������ �������趨ȫ������ʾ
������ ��ܰ��ʾ��
������ Ϊ�����İ�ȫ��������ʻ���벻Ҫ���в���������ز��ս�ͨ�����ʻ��
������ ����Ʒ������ȫ��ʾ��������ʹ�á�
������ ���ֲ����������ݽ���Ϊ���ܹ������ã����Ʒ���������仯��ʵ��ʹ��������ʵ��Ϊ!
������Ʒ��װ���
����

��������
����

����רҵ����
����

������Դ��
����

����USB������
����

��������
����
����˵����
������ ��������
����(һ)����˵��
����һ . ������������λ��˵��
����

������. ����������ʾ˵��
����1. ������������
����1-1����ʱ���Ƚ�����ʾӫĻ���ԡ�
����1-2����汾��ʾ��ĿǰGPS�汾�������� ��
����1-3����ʱ����ʾ��Ŀǰʱ����� ������(12Сʱ��)��
����1-4��ʻģʽ��ʾ��Ԥ��ֵΪ����ȫ��ʻ����ģʽ����
����1-5�״�Ѷ������趨��ʾ��Ŀǰ�״�Ѷ���趨���ߡ���Ԥ��ֵΪ�ߡ�
����2. ��������״̬
����2-1���������ӳɹ�ʱ�����Ȳ���"ף��;ƽ��"��
����2-2��������������״̬������������ʾ��ǰ��λ�����ṩʱ�䲥���������������֮��ʾ��
����2-3������δ����ʱ���������̽�����ʾ��
����3. GPS��ʻģʽ�趨
����
����4. �״�����趨
������סUP/DNԼ3������״�ж��趨����/��/��/����
����

������. �������ܲ�ѯ
����1. ϵͳ��Ѷ��ѯ������ģʽ
����

������ �˹�����Ŀ��ѯ���ᰴ�� SET ��һ�룬��ʼ�ܽ����������ܲ�ѯ.
���������ظ����������ᰴ�� MOD �� һ��
����1-1��������λ��:��ʾ��ǰ�ľ�γ�ȣ�����Ŀ���ڻ���������������ܲ�ѯ�����������Ŀǰʹ�������ڷ�λ��������γ���뺣�θ߶ȣ������Ӵ�����ʹ״̬Ҳ�Ქ����ʻ����
����1-2����ʱ���ѯ������Ŀ���ڻ���������������ܲ�ѯ���������ǽ�����ʾĿǰ�����ں�ʱ��
����1-3��ƿ��ѹ��ѯ������������Ŀǰ��״��������ƿ��ѹ��ֵ��
����1-4ϵͳ����ģʽ����ʹ������Ҫ������������ʱ�����л�GPS������ϵͳ����ģʽ�����ܿ�ʼ����������£����������ַ�� http://conqueror.gpscamera.org ���ڸ���֮ǰ��ע���������
������ ϵͳ���� WINDOWS XP ( SP1/SP2 )�� WINDOWS VISTA
������ ��������
����WINDOWS XP(SP1/SP2)
����1.PL-2303 USB-to-Serial����
����2.Microsoft installer 3.1
����3.Microsoft.Net Framework2.0
����WINDOWS VISTA(X86)
����1.PL-2303 USB-to-Serial(X86ר��)
����WINDOWS VISTA(X64)
����1.PL-2303 USB-to-Serial(X64ר��)
������ ��������� Microsoft Internet Explorer
������. ϵͳ�����趨
����1. ϵͳ����ѭ���趨
����

�������˹�����Ŀ��ѯ�賤�� �� SET �� ���룬���ܽ���ϵͳ����ѭ���趨.
��������ϵͳ�����趨��ÿ�ᰴSETһ�룬�Ϳ�ѭ��ѡ������ϵͳ���ܣ�
������������Ϻ�ɳ����� SET �����봢���趨�����뼴�ص�Ԥ�軭�档
�����ڸ���ģʽ�趨�У�ֻ�败����UP or DN �� ���ɶԵ���ģʽ�Ĺ��ܽ���ѡ��
����1-1�ٶ��趨 , ���趨��Χ�� 0 ���� �� 50 ���� ��ÿ�ε���10�������Ԥ��ֵΪ 40 ���� �������ٵ��� 40����ʱ�������粨ʽ�״�ϵͳֻ����˸�ƹ⣬���������졣
����1-2�����趨 ,���趨��Χ�� 0 ���� �� 150 ���� ��ÿ�ε���Ϊ10�������Ԥ��ֵΪ 0 ���� �����û��������趨Ϊ 100 ���� �����г��ٶȸ��ڴ��趨ֵʱ��ϵͳ���Զ��������پ��棬ֱ���г��ٶȵ��ڴ��趨ֵΪ�ˡ����ڴ˹��ܣ�������Ϊ�Խ������֮��ʾ��·��֮���ޣ��Լ���ʾ���볤�ȵIJɼ����ݡ�
����1-3�ٶȵ����趨 , ���趨��Χ�� 0 ���� �� 20 ���� ������Ԥ��ֵΪ 5 ���� ���� GPS �ٶ��복���ٶȲ�һ��ʱ�������й۲�һ��ƽ�����ֵ���ٵ����� GPS �ٶ��복���ٶ������
����1-4�������������趨 ,�ɵ���Ϊ��������ģʽ -> ����ģʽ -> ��������ģʽ������Ԥ��ֵΪ��������ģʽ����������������ʾ����ϸ����������ʾ��
������ ��������ģʽ���ڴ�ģʽ�£������ӿ���������ϵͳ��ʾ��ǰ������������ʾ����ϵͳ�����ࡢ���ټ���Ļ��ʾ�������룬�����ٳ���������ϵͳ����ֵʱ��ϵͳ���Զ���������������ʾ���������ٵ�������ֵʱ��ϵͳ��ֹͣ����������ʾ�������������뵹����
������ ����ģʽ���ڴ�ģʽ�£������ӿ����̶�����ϵͳ��ʾ��ǰ��ϵͳ��������ʾ����ϵͳ�����ࡢ���ټ���Ļ��ʾ�������룬���۳��ӳ�������ϵͳ����ֵ���ϵͳ�����ᷢ�����������ľ�ʾ����
������ ��������ģʽ���ڴ�ģʽ�£������ӿ����̶�����ϵͳ��ʾ��ǰ��ϵͳ��������ʾ����ϵͳ�����ࡢ���ټ���Ļ��ʾ�������룬���۳��ӳ�������ϵͳ����ֵ���ϵͳ�������������������ľ�ʾ����ֱ�����о����̶�����ϵͳ��ʾ�㡣
����1-5�Խ�����ɾ��ѡ�� , ����Խ������ѧ˵��
����1-6ʱ��ѡ���趨 , ��DN����ѡ��ʱ���ݼ�������MOD���л�ʱ�Ӻͷ��ӡ�
����1-7LED����ɫѡ��, �ڴ�ģʽ�£������¡�UP or DN��,��Ļ�ͻ�ӡ�LED0-LED7��ѭ����ɫ��
����1-8����ϵͳ�趨, ԭ��Ԥ��ֵΪ NO.2,���跶ΧΪNO.1-NO.2-OFF,��ʹ����ѡ��ر�����ϵͳʱ����ֹͣ���ܷ���ʽ�������ϵͳֻ����GPS���ܡ�
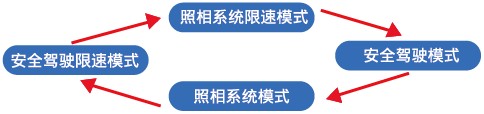
������. ��ʻģʽ�л��趨
������ �˹�����Ŀ��ѯ�賤���� MOD �����룬��ʼ�ܽ����ʻģʽѭ���趨 ��
����

����1-1��ȫ��ʻ����ģʽ������ʾʹ���߹̶����������� ��������뵹�� �⣬�������ǰ��ʾ������·�Ρ��̳���ѧУ������վ���շ�վ����ʹ���߸������յ�·״����
����1-2����ϵͳ����ģʽֻ����ʾʹ�������ù̶����������� ��������뵹�� �����ᾯʾ������·�Ρ��̳���ѧУ������վ���շ�վ�Ȱ�ȫ����ʾ��
����1-3 ��ȫ��ʻģʽ ͬ1-1.���������������Ქ���þ�ʾ��·�����ޡ�
����1-4 ����ϵͳģʽͬ1-2.���������������Ქ���þ�ʾ��·�����ޡ�
����(��)��������ģʽ
������ ϵͳ���½�ѧ ������ַ��http://conqueror.gpscamera.org
��������һ��
������ ���������������ԣ�GPS�����л���ϵͳ����ģʽ����Ļ��ʾ��dn��
����

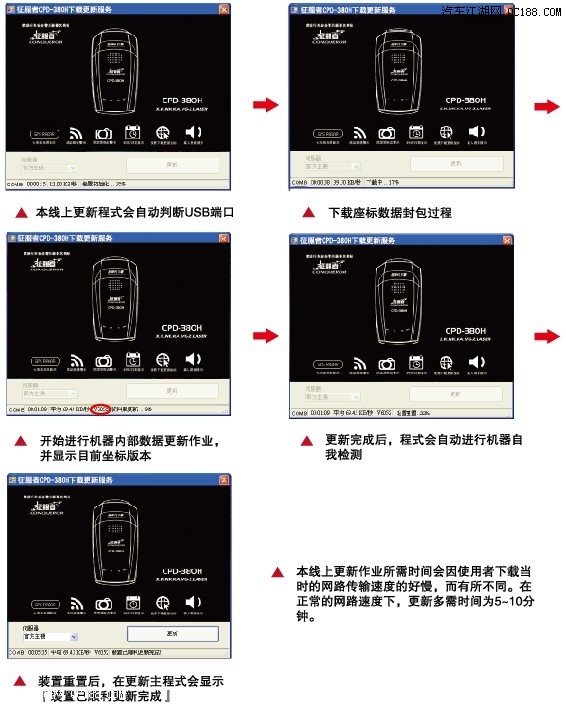
������ �û�������ǰ��أ���ȷ�����Ե�WINDOWS�İ汾��Ѷ����ͬ��WINDOWS�汾�в�ͬ�ĸ���������������֮�������û����밲װ����֮���������¿������ٵ�ѡ�û��͵�ͼʾ�����ܽ����������ݸ��³���
����

������ �û��ڽ������ϸ��³�ʽʱ�������ݱ�������λ�ã�ѡ�����֮�ŷ����������أ� ����Ʒ���ڲ������±�ʶϵͳ��������ǰ����Ҫ�ٽ����κ�ע�ᣬֻҪ�DZ���˾ԭ������֮��Ʒ���ٽ��� ����� �ij�����ɰ�ͼ�еĸ��¿�ʼ���ء�
����
����(��)�ָ�ԭ������
����һ. �״�Ѷ������趨
����

����(��)�û��Խ������ѧ
����1 ���Խ����깦�ܽ���
��������Ʒ�����ṩȫ����������Ĺ̶������밲ȫ�ྯʾ����㣬���ڽ� 256 �ʳ����Խ�������������ʹ���������������꾯ʾ�㲢�������趨ֵ������ʾ�ľ��룬���趨��ɺ�ʹ�����պ��о������Խ������ǰ��ϵͳ����ǰ��ʾ��ǰ��Ϊ�Խ�����㣬��С�ļ�ʻ��������������ʾ(���ʹ�������趨������ģʽ�£���ͨ������ʾ��ǰ��Ϊ�Խ�����㣬���� XX �����С�ļ�ʻ������ͨ�������ʱ��ϵͳ�ᷢ���Խ���������������ʱ��ʾ������ʾ�� PASS ����)
����2 ���Խ������ռ�����
����2.1 �����Խ�����
�������г��������������ͬ����λ��ʽ����ͼ�⣺
����
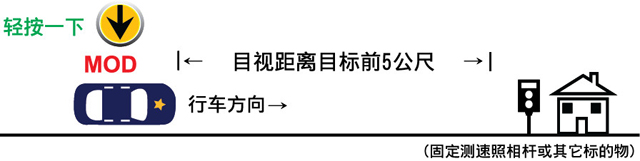
������ʹ����ֻҪ����Ŀ����ǰ 5 ���ߣ���һ�¡� MOD ��������ϵͳ�ռ����ʱ����ʾ���ϻ���ָ������ı��(�����0��255)������ʾ���Խ����������趨��ɡ��� 2 ���ָ�������ʾ��
����2.2 �����Խ�����
�������г��������������λ��ʽ����ͼ�⣺
����
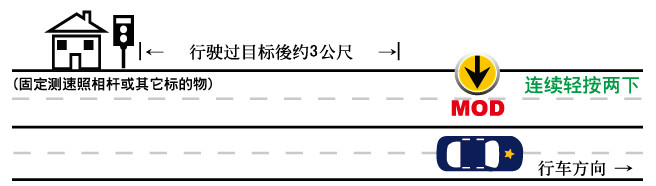
������ʹ����ֻҪ����Ŀ����3 ���ߺ����������¡�MOD������������ʾ�����Խ�������㡣��ϵͳ�ռ����ʱ����ʾ���ϻ���ָ������ı��(�����0��255)�� ����ʾ�������Խ����������趨��ɡ� 2 ���ָ�������ʾ��
����2.3 �����趨ֵ���ռ�������Բο�ֵ
��������Ѳ���ռ�����
����110-30 ����Լ150 ����
����240-60 ����Լ300 ����
����30 �� 70-80 ����Լ500 ����
����490 ���� Լ700 ����
����5100-150 ����Լ1000 ����
�����Խ��������ռ����������ݶ����趨����ֵ�������ģ����磬��ʹ���߽�����ֵ�趨Ϊ 0 ���� ʱ��ʹ���ߵ��Խ������ռ��������Ϊ 500 ���� ���������ͼ����ֵ���ռ�������Բο�ֵͼ����
����2.4 �Խ������ռ�ע�����
�������ռ������Խ������ʱ������ʻ·��С������ʾ���룬ϵͳ����֡� LES ������ʱ���ռ������Խ�����㡣���磬������ֵ��Ϊ0����ʱ��ʹ���߱�����ʻ����500 ���ߣ����ܿ�ʼ�ռ������Խ�����㡣��ʹ����Ҫ�ռ������Խ������ʱ��������ʻ·������С������ʾ����Ӱ�죬�����������Ǻ�ֱ���ռ���
������ ����Ʒ�Խ���������ɴ��� 256 �ʣ�������������ʱ��ϵͳ����֡� OER ������ʱ����ɾ������Ҫ�������Ѿ��ϴ��ر���˾���Խ������
����2.5 �Խ������ɾ����
�����������Խ������ɾ�������Ƚ��뵽�Խ�����ɾ��ѡ�����趨���ٰ���UP������������DN���ݼ�����㣬ѡ������Ҫɾ����������ţ��ٳ����� UP/DN ��ɾ���ñ��Խ�����㡣
������ȫ���Խ������ɾ�������Ƚ��뵽�Խ�����ɾ��ѡ�����趨���ٳ���MOD�Ϳ�ɾ��ȫ���Խ�����㡣
����2.6 �û��Խ�������ϴ�������
�������й���½��·�����������죬���ʹ���߷��ֵ��������Ĺ̶�����������������ȫ��ʾ�㣬�������Խ�������ռ��ķ�ʽ���������Ĺ̶�����������������ȫ��ʾ���ռ����������ϴ�������˾���û��Խ����������վ�����ǽ����촦�����ԣ�������ʹ���߷�����������������㡣�ϴ�������ַΪ��http://cp.gpscamera.org/
����3�� ��Ʒ��װλ�ý���
����

����4�� GPS ��һ������
������Ҫ������Ƶ�ʷ�Χ
�������ǽ���Ƶ�� 1.57542GHZ �� 1.023MHz-110 �� 2dB
�������� X-BAND 10.525GHz �� 100 MHz- 110 �� 2dB
�������ż� K-BAND 24.125GHz + 300 MHz-124 �� 2dB
����24.125GHz - 500 MHz
����֤���״� Ka-BAND 35.100GHz �� 100 MHz-115 �� 2dB
�������� Ka-BAND 34.700GHz �� 1300 MHz-115 �� 2dB
�������ż� Ka-BAND 34.300GHz �� 1300 MHz-115 �� 2dB
��������ǹ Laser Beam 904nm + 33nm1.���Ͽ������� 360000 ��
����2.�Խ��������� 256 ��
����3.�������ֵ���� 10 ( m ) 4.������ʾ�� 0-999 ( m )
����5.�������̣����������ϡ������������� �ϡ�����������
����������� VG2 11.150GHZ �� 175MHz
������Դ��Ӧ���� DC12V
����������� ��300mA
���������¶� -25 �� -75 ��
2013��8��26��
װ��A9����/Minisun4.6��������ƽ̨ ������U350ȫ�����ܵ�������