
LEDЯдЪО/Ъ§ЮЛЕчзгТоХЬЗНЮЛжИЪО еїЗўепVP-2800ВњЦЗЫЕУї
 ЫљЪєЗжРрЃКGPS/DVDЕМКН
2013-7-31 9:32:30 ЭЦМіжИЪ§ЃК
ЫљЪєЗжРрЃКGPS/DVDЕМКН
2013-7-31 9:32:30 ЭЦМіжИЪ§ЃК
ЁЁЁЁ

ЁЁЁЁ
ЁЁЁЁ

ЁЁЁЁ

ЁЁЁЁ
ЁЁЁЁ
ЁЁЁЁЦЗЁЁЁЁХЦеїЗўеп conqueror
ЁЁЁЁЎaЦЗаЭЬVP-2800
ЁЁЁЁгУЭОЗжювЛѓwC (GPS + RADAR)
ЁЁЁЁжївЊАДцIUP
ЁЁЁЁбЁдёЯђЩЯ/Енді/ЕЅБЪзјБъЩОГ§
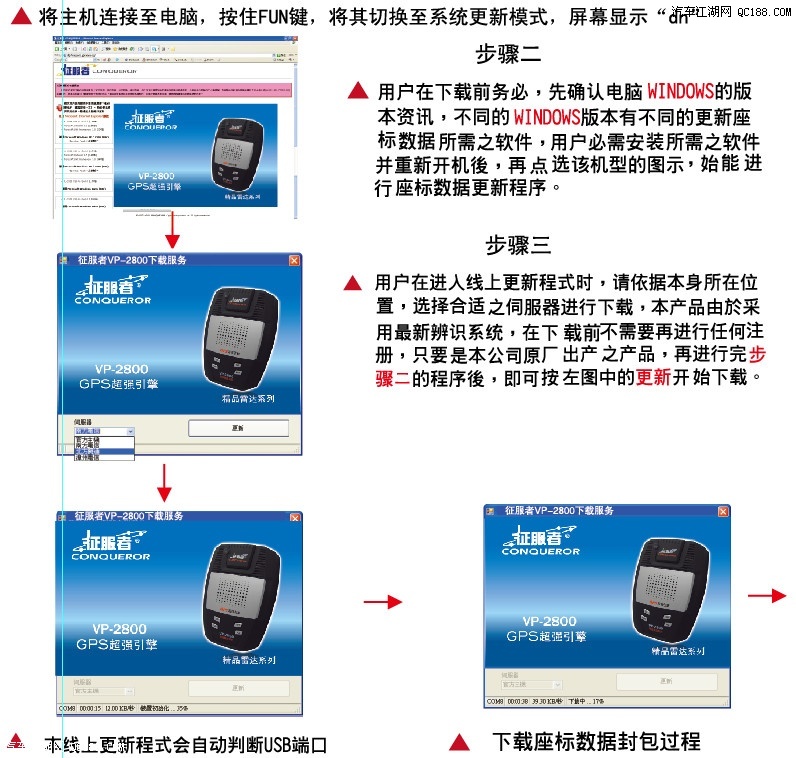
ЁЁЁЁDN
ЁЁЁЁбЁдёЯђЯТ/ЕнМѕ/ЕЅБЪзјБъЩОГ§
ЁЁЁЁFUN
ЁЁЁЁЙІФмЩшЖЈ/ВщбЏ(бЛЗЙІФм)
ЁЁЁЁPOIздНЈзјБъ/ЩшЖЈВЅБЈ/ЯЕЭГЛиИД/GPSФЃЪН/АВШЋМнЪЛФЃЪН/ееЯрЯЕЭГФЃЪН/ШЋВПзјБъЩОГ§
ЁЁЁЁГпДч(щL x x Ип)
ЁЁЁЁжиСП(g)
ЁЁЁЁЖЈю~ыК12V
ЁЁЁЁЙЄзїиЖШ-25 ~ 75 Ёу
ЁЁЁЁЕўИќаТмѓwService Pack
ЁЁЁЁИќаТОWжЗhttp://conqueror.gpscamera.org
ЁЁЁЁзљЫИќаТ ^гђжајбиКЃ (V60xx)
ЁЁЁЁжајЮїББ (V50xx)
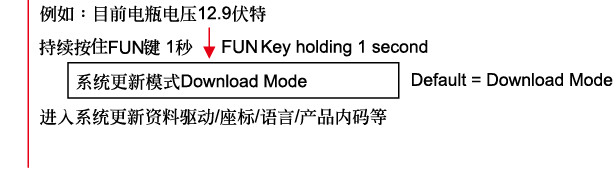
ЁЁЁЁИќаТЯТнdФЃЪННЋжїЛњСЌНгЕчФдЃЌАДзЁFUNМќЃЌНЋЦфЧаЛЛжСЯЕЭГИќаТФЃЪНЃЌЦСФЛЯдЪОЁАdnЁБ
ЁЁЁЁЩЯЪаrщgМДНЋЩЯЪа
ЁЁЁЁНЈзhЪлr
ЁЁЁЁБЃаоrщg(Фъ)1
ЁЁЁЁЁі ЙІФмМђНщ
ЁЁЁЁЁя ЙЬЖЈВтЫйееЯрОЏЪО
ЁЁЁЁЁя СїЖЏВтЫйееЯреьВт
ЁЁЁЁЁя ШЋЦЕРзДяЦЕТЪНгЪе(XЁЂKЁЂKaЁЂNewkЁЂLaserЁЂVG-2НгЪе)
ЁЁЁЁЁя ПЩздаадіЩше§ЁЂЗДЯђЫЋЕузјБъЃЌзюЖрПЩДя256БЪ
ЁЁЁЁЁя УтЗбЩ§МЖИќаТ
ЁЁЁЁЁя LEDЯдЪОЁЂЪ§ЮЛЕчзгТоХЬЗНЮЛжИЪО
ЁЁЁЁЁя дЫзїЁЂЩшЖЈШЋгявєЬсЪО
ЁЁЁЁЁя ЬсабЪеЗбеОЁЂанЯЂеООрРыЁЂЫэЕРПЊЭЗЕЦЕШАйжжЙІФм
ЁЁЁЁЁя ОЮГКЃАЮИпЖШВщбЏЃЌЪБМфШеЦкВщбЏЃЌЮРаЧбЖКХВщбЏЃЌЕчЦПЕчбЙВщбЏ
ЁЁЁЁЁі ГЃМћQ&A
ЁЁЁЁГЃМћЮЪЬтМАНтОіЗНЗЈ
ЁЁЁЁЮТмАЬсЪОЃК
ЁЁЁЁЙІФмвдЪжжаЪЕМЪЮЊзМЃЌБОЪжВсНіЙЉВЮПМ;
ЁЁЁЁБОВњЦЗНіЙЉАВШЋОЏЪОЃЌЧыЮ№ГЌЫйЪЙгУ;
ЁЁЁЁЮЊСЫФуЕФАВШЋЃЌЧыЮ№БиВЮееЪЕМЪЕФНЛЭЈЙцдђМнЪЛ!
ЁЁЁЁЁі ЛљБОЙІФм
ЁЁЁЁ(вЛ)GPSЦєЖЏзДЬЌ
ЁЁЁЁ1.ПЊЛњГЬађ
ЁЁЁЁ1-1 ПЊЛњ
ЁЁЁЁ
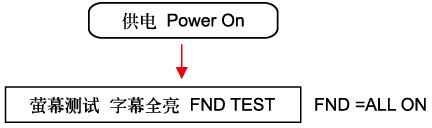
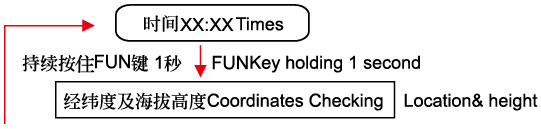
ЁЁЁЁ1-2 ШЋгЉФЛFNDВтЪдЃККЌЕчзгТоХЬЯдЪО/РзДяЦЕТЪЯдЪО/ОрРыЫйЖШЯдЪОЦї-ШЋССЯдЪО
ЁЁЁЁ

ЁЁЁЁ1-3 ЛЖгДЪЃКЛЖгЪЙгУGPSОЋЦЗРзДяЯЕЭГЃЌЧыЯЕКУАВШЋДј!
ЁЁЁЁ1-4 зјБъАцБОЃКФПЧАGPSАцБОЃК*****
ЁЁЁЁ

ЁЁЁЁ1-5 МнЪЛФЃЪН(дЄЩш)ЃКАВШЋМнЪЛФЃЪН
ЁЁЁЁ1-6 РзДяеьВтбЖКХ(дЄЩш):ФПЧАРзДяеьВтбЖКХИп
ЁЁЁЁ

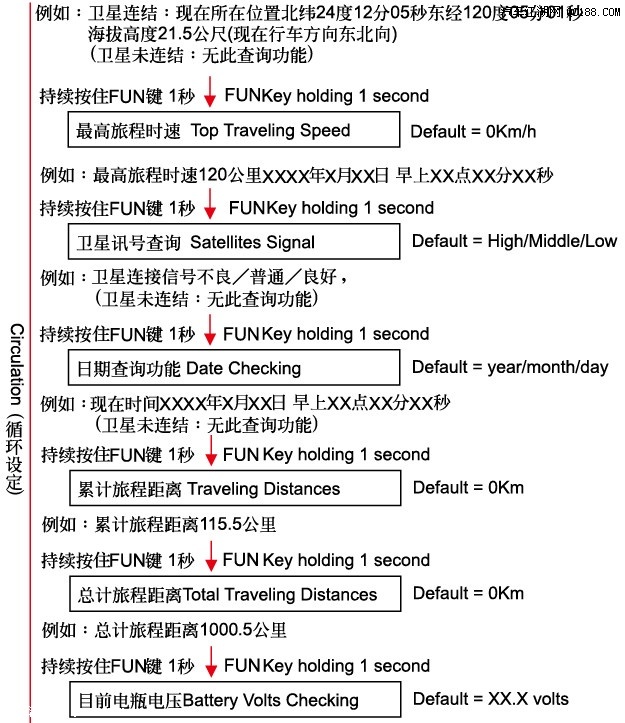
ЁЁЁЁ1-7 ЮРаЧСЌНсГЩЙІ:ЯждкЪБМф200XФъXXдТxxШе дчЩЯ/ЯТЮчxxЕуxxЗжxЁСУы(НіЯоьЖЮРаЧСЌНсГЩЙІЪБВЅБЈ)
ЁЁЁЁ1-8 ЮРаЧСЌНсГЩЙІЪБЃЌЪБМфжаЁАЃКЁБЛсГжајЩСЫИЃЌПЊЛњЪБЬсЙЉЪБМфВЅБЈМАЮРаЧСЌНсЭъГЩжЎЬсЪО
ЁЁЁЁ1-9 ЮРаЧЮДСЌНсЃЌЪБМфжаЁАЃКЁБВЛЛсГжајЩСЫИЃЌПЊЛњссЮоЗЈЬсЙЉЪБМфВЅБЈЛђЮРаЧСЌНсЭъГЩжЎЬсЪОЁЃ
ЁЁЁЁ2.GPSМнЪЛФЃЪНЩшЖЈЃК
ЁЁЁЁПЩЧјЗжМИжжАВШЋЕШМЖЃКАВШЋМнЪЛФЃЪН(дЄЩшжЕ)/ееЯрЯЕЭГФЃЪН/АВШЋМнЪЛЯоЫйФЃЪН/ееЯрЯЕЭГЯоЫйФЃЪН
ЁЁЁЁ
ЁЁЁЁ2-1 АВШЋМнЪЛФЃЪНЃКЕчзгТоХЬаЧКХЁяЙиБессЃЌГ§ееЯрЯЕЭГРрЬсЪОЭтЃЌШЫадЛЏдіМгАВШЋРрЬсЪОЃЌШчвзеиЪТТЗЖЮ/ЩЬГЁ/ЛњГЁ/бЇаЃЕШгяОфЬсЪО
ЁЁЁЁ2-2 ееЯрЯЕЭГФЃЪНЃКЕчзгТоХЬаЧКХЁяПЊЦєссЃЌНіЬсЙЉееЯргявєЬсЪОЃЌЛЛбджЎЃЌЗЧееЯрРрВЛЬсЪО
ЁЁЁЁ
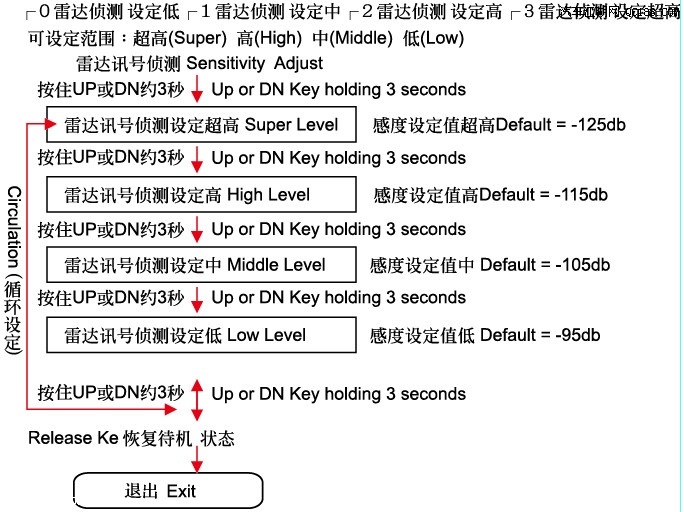
ЁЁЁЁ3.РзДяеьВтЩшЖЈЕШМЖЃКГЌИп/Ип/жа/ЕЭ
ЁЁЁЁ
ЁЁЁЁ4.Д§ЛњзДЬЌ
ЁЁЁЁЪБЮЪЃКЮРаЧСЌНсЭъГЩGPSВЅБЈЯждкЪБМф*Фъ*дТ*ШедчЩЯ*Еу*Зж*УыЁЃ
ЁЁЁЁЫйЖШЃКГЕзгвЦЖЏЃЌGPSЛсвРЪЕМЪГЕСОЯдЪОааЪЛЕФГЕЫйЃЌдЄЩшЮЊЙЋРя/ЪБЫйЯдЪОЁЃ
ЁЁЁЁОрРыЃКГЕзгППНќееЯрЕуЛђРзДя/РзЩфОГЃГіУЛТЗЖЮжЎОЏЪОЕуЃЌGPSЛсМЦЫуГіГЕзггыФПБъМфЕФОрРы
ЁЁЁЁЗНЮЛЃКГЕзгвЦЖЏЃЌGPSЛсвРЪЕМЪЗНЮЛЯдЪОецЪЕЕФааГЕЗНЯђ
ЁЁЁЁ(Жў)жївЊАДМќЙІФмЫЕУї
ЁЁЁЁ

ЁЁЁЁ1 . FUN МќЙІФмЫЕУї
ЁЁЁЁUp(Ёї)зѓЩЯАДМќЃКЯђЩЯбЁдё/ИаЖШЕїЩ§/ЕЅБЪзљБъЩОГ§
ЁЁЁЁDN(Ј)гвЩЯАДМќЃКЯђЯТбЁдё/ИаЖШЕїНЕ/ЕЅБЪзљБъЩОГ§
ЁЁЁЁFUN(*)зѓЯТАДМќЃКЙІФмЩшЖЈ/ЙІФмВщбЏ/РыПЊЩшЖЈ
ЁЁЁЁButtonЙІФмЖЏзїЕїећМАгявє/ЯдЪОЦїБэЯж
ЁЁЁЁFUNМќРзДяОВ
ЁЁЁЁвєЩшЖЈГжајАДжјFUNМќ3УыЃЌНјШыЙІФмЩшЖЈФЃЪНЃЌЕквЛЯюЩшЖЈгявєВЅБЈЁАРзДяОВвєЩшЖЈЁБЃЌФПЧАЩшЖЈ40ЙЋРяЁБЃЌЮоШЮКЮЖЏзїЛђАДжјfunъљЃЌДѓдМ3-4УыШЗШЯссЃЌЬјЛиГжЛњзДЬЌУПАДUPМќдіМг10ЙЋРя;УПАДDNМќМѕЩй10ЙЋРяЁЃ
ЁЁЁЁЫйЖШЕїећЗЖЮЇЃК0-50ЙЋРяЃЌ
ЁЁЁЁдГЇдЄЩшжЕЮЊ40ЙЋРя/аЁЪБЃЌМДГЕЫйЕЭгк40ЙЋРяЪБЃЌМДЪЙгіЕНЕчВЈЪНРзДяЯЕЭГЛсздЖЏОВвєЃЌжЛЩСЫИЕЦЙтЃЌПЩХХГ§ЪаЧјжаВЛЕБЕФИЩШХЁЃ
ЁЁЁЁбВКНЫйЖШЩшЖЈАДвЛЯТFUNМќЃЌЕк2ЯюЩшЖЈгявєВЅБЈЁБбВКНЫйЖШЩшЖЈЃЌФПЧАЩшЖЈ0ЙЋРяЃЌЮоШЮКЮЖЏзїЛђАДжјFUNМќЃЌДѓдМ3-4УыШЗШЯссЃЌЬјЛиД§ЛњзДЬЌУПАДUPМќдіМг10ЙЋРя;УПАДDNМќМѕЩй10ЙЋРяЁЃ
ЁЁЁЁЫйЖШЕїећЗЖЮЇЃК0-150ЙЋРяЃЌ
ЁЁЁЁдГЇдЄЩшжЕЮЊ0ЙЋРя/аЁЪБЃЌМДЙиБеДЫЙІФмЃЌШчЩшЖЈЮЊ100ЙЋРяЃЌГЕЫйИпгк100ЙЋРяЪБЃЌЯЕЭГЛсздЗЂГіГЌЫйОЏИцЃЌГЕЫйЕЭгк100ЙЋРяЃЌЯЕЭГВЛЗЂГіГЌЫйОЏИцЁЃ
ЁЁЁЁГЕЫйЮѓВюЮЂЕїЩшЖЈАДвЛЯТFUNМќЃЌЕк3ЫГгявєВЅБЈЁАГЕЫйЮѓВюЮЂЕїЩшЖЈЃЌФПЧАЩшЖЈ+5ЁАЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќдіМг1ЙЋРя;УПАДDNМќМѕЩй1ЙЋРяЁЃ
ЁЁЁЁЫйЖШЕїећЗЖЮЇЃК0-20ЙЋРяЃЌдГЇдЄЩшжЕЮЊ5ЃЌШчGPSЫйЖШгыГЕзгЫйЖШВЛвЛжТЃЌПЩЯШааЙлВщвЛАуЦНОљЮѓВюжЕЃЌдйЕїећжСGPSЫйЖШгыГЕзгЫйЖШЯрНќЁЃ
ЁЁЁЁгявєЯьЩљЩшЖЈАДвЛЯТFUNМќЃЌЕк4ЯюгявєВЅБЈЁАгявєЯьЩљЩшЖЈЃЌФПЧАЩшЖЈгявєЯьЩљФЃЪНЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќЯђЩЯбЛЗ;УПАДDNМќЯђЯТбЛЗЁЃ
ЁЁЁЁЕїећЗЖЮЇЃКгявєЯьЩљФЃЪН(C0)ЁЊ>гявєФЃЪН(C1)ЁЊ>СЌајЯьЩљФЃЪН(C2)ЁЊ>вєРжФЃЪН(C3)ЁЊ>гявєЯьЩљФЃЪН(C0)
ЁЁЁЁдГЇдЄЩшжЕЃКгявєЯьЩљФЃЪНЁЃ
ЁЁЁЁ1.гявєЯьЩљФЃЪНЃКЕБГЕзгППНќЙЬЖЈееЯрИЫЃЌГ§гявєЬсЪОееЯрИЫЭтЃЌГЕЫйГЌЙ§ЙЬЖЈИЫЕФЫйЯожЕвдЩЯЃЌЯЕЭГЛсЗЂГіГЌЫйЁАЕБЕБЁБОЏИц;ЕБГЕЫйЕЭгкЙЬЖЈееЯрИЫЫйЯожЕвдЯТЪБЃЌЯЕЭГЛсздЖЏОВвєгыОрРыЕнМѕЯдЪОЁЃ
ЁЁЁЁ2.гявєФЃЪНЃКЕБГЕзгППНќЙЬЖЈееЯрИЫЃЌНігявєЬсЪОееЯрИЫЃЌЯЕЭГЛсздЖЏОВвєгыОрРыЕнМѕЯдЪОЁЃ
ЁЁЁЁ3.СЌајЯьЩљФЃЪНЃКГЕзгППНќЙЬЖЈееЯрИЫЃЌГ§гявєЬсЪОееЯрИЫЭтЃЌВЛЙмЪЧЗёГЌЙ§ЙЬЖЈееЯрЫйЯожЕгыЗёЃЌЯЕЭГЛсздЖЏЬсЪОЁАЕБЕБЁБОЏИцгыОрРыЕнМѕЯдЪОЁЃ
ЁЁЁЁ4.вєРжФЃЪНЃКЕБГЕзгППНќЙЬЖЈееЯрИЫЃЌНівєРжЬсЪОееЯрИЫЃЌЯЕЭГЛсздЖЏОВвєгыОрРыЕнМѕЯдЪОЁЃ
ЁЁЁЁгУЛЇздНЈзљБъЩОГ§ЩшЖЈАДвЛЯТFUNМќЃЌЕк5ЯюгявєВЅБЈЁАздНЈзљБъЩОГ§бЁдёЃЌдЄЩшЖЈ0БЪЃЌбЁдёздНЈзљБъБрКХЃЌбЁдёБрКХКѓЃЌГЄАДUP or DN or POIМќКѓгявєВЅБЈЁБздНЈзљБъЩОГ§ЭъГЩЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќдіМг1БЪ;УПАДDNМќМѕЩй1БЪЁЃ
ЁЁЁЁдГЇЩшЖЈжЕЮЊ0БЪЃЌзюДѓДЂДцБЪЪ§256БЪ
ЁЁЁЁЕЅБЪзљБъЩОГ§ЃКбЁШЁгћЩОГ§жЎЕЅвЛаЫШЄЕуЪБЃЌдйГЄАДUPЛђDNМќЃЌПЩЩОГ§ЕЅБЪздНЈзљБъЕуЁЃ
ЁЁЁЁШЋВПздНЈзљБъЩОГ§ЃКНјШыздНЈзјБъЩОГ§ЩшЖЈЃЌдйГЄАДPOIМќЩОГ§ШЋВПздНЈзљБъЕуЃЌгявєЬсЪОздНЈзљБъЩОГ§ЭъГЩЁЃ
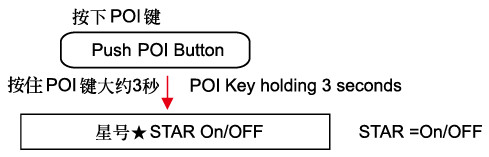
ЁЁЁЁЛЖгДЪбЁдёЩшЖЈАДвЛЯТFUNМќЃЌЕк6ЯюгявєВЅБЈЁАЛЖгДЪбЁдёЩшЖЈЃЌФПЧАЩшЖЈМђЖЬЛЖгДЪЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќЯђЩЯбЛЗ;УПАДDNМќЯђЯТбЛЗЁЃ
ЁЁЁЁЕїећЗЖЮЇЃКЭъећЛЖгДЪ(L)ЁЊ>МђЖЬЛЖгДЪ(S)ЁЊ>ЭъећЛЖгДЪ(L)
ЁЁЁЁдГЇЩшЖЈжЕЮЊЭъећЛЖгДЪЃЌПЊЛњЪБЛсгаЭъећЙІФмЩшЖЈгяОфЁЃ
ЁЁЁЁУїССФЃЪНЩшЖЈ(дчЩЯ)АДвЛЯТFUNМќЃЌЕк7ЯюгявєВЅБЈЁАУїССФЃЪНЦєЪБМфЩшЖЈЃЌФПЧАЩшЖЈдчЩЯ6ЃК00ЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќдіМг1аЁЪБ;УПАДDNМќМѕЩй1аЁЪБЁЃ
ЁЁЁЁЕїећЗЖЮЇЃКдчЩЯAM1ЃК00-12ЃК00
ЁЁЁЁдГЇдЄЩшжЕЮЊЪЧдчЩЯAM6ЃК00ЪБЃЌМДдчЩЯ6ЃК00Ц№ЛсздЖЏЕїећFNDССЖШБфСС
ЁЁЁЁЮЂАЕФЃЪНЩшЖЈ(ЯТЮч)АДвЛЯТFUNМќЃЌЕк8ЯюгявєВЅБЈЁАЮЂАЕФЃЪНЦєЪБМфЩшЖЈЃЌФПЧАЩшЖЈЯТЮч6ЃК00ЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќдіМг1аЁЪБ;УПАДDNМќМѕЩй1аЁЪБЁЃ
ЁЁЁЁЕїећЗЖЮЇЃКЯТЮчPM1ЃК00-12ЃК00
ЁЁЁЁдГЇдЄЩшжЕЮЊЪЧЯТЮчPM6ЃК00ЪБЃЌМДЯТЮч6ЃК00Ц№ЛсздЖЏЕїећFNDССЖШБфАЕ
ЁЁЁЁ2 . жїЛњЙІФмВщбЏ
ЁЁЁЁДгВщбЏПЊЪМЕНД§ЛњзДЬЌбЛЗЪНВщ
ЁЁЁЁ
ЁЁЁЁ
ЁЁЁЁ
ЁЁЁЁ
ЁЁЁЁ3.FUN/POI МќЙІФмЫЕУї
ЁЁЁЁPOI(Ёћ) гвЯТАДМќЃКаЫШЄЕуЪеМЏМАЩОГ§ЙІФм
ЁЁЁЁздНЈзљБъ / ЩшЖЈВЅБЈ / ЯЕЭГЛиИД /GPS ФЃЪН(АВШЋМнЪЛФЃЪН / ееЯрЯЕЭГФЃЪН)
ЁЁЁЁButton ЙІФм ЖЏзї
ЁЁЁЁDN
ЁЁЁЁЕнМѕЩшЖЈ гкЙІФмЩшЖЈзДЬЌЯТЃЌУПЧсАД DN Мќ 1 ДЮЃЌЮЊЕнМѕЩшЖЈЕїећЁЃ
ЁЁЁЁЕнМѕРзДяИаЖШЩшЖЈ Д§ЛњзДЬЌЯТЃЌУПДЮГжајАДзХ DN МќдМ 3-4 УыЃЌЮЊИаЖШЕШМЖЕнМѕЩшЖЈЕїећЁЃ
ЁЁЁЁЕнМѕвєСП
ЁЁЁЁЕїећЩшЖЈ Д§ЛњзДЬЌЯТЃЌУПДЮЧсАД DN МќдМ 1 УыЃЌЮЊЕнМѕвєСПЕїећЩшЖЈЃЌЩшЖЈЗЖЮЇ 0~15 МЖжЙЁЃ
ЁЁЁЁUP ЕндіЩшЖЈ гкЙІФмЩшЖЈзДЬЌЯТЃЌУПДЮЧсАД UP Мќ 1 ДЮЃЌЮЊЕндіЩшЖЈЕїећЁЃ
ЁЁЁЁЕндіРзДя
ЁЁЁЁИаЖШЩшЖЈ Д§ЛњзДЬЌЯТЃЌУПДЮГжајАДзХ UP МќдМ 3-4 УыЃЌЮЊИаЖШЕШМЖЕндіЩшЖЈЕїећЁЃ
ЁЁЁЁЕндівєСП
ЁЁЁЁЕїећЩшЖЈ Д§ЛњзДЬЌЯТЃЌУПДЮЧсАД UP МќдМ 1 УыЃЌЮЊЕндівєСПЕїећЩшЖЈЃЌЩшЖЈЗЖЮЇ 0~15 МЖжЙЁЃ
ЁЁЁЁDN/UP Мќ ЕЅБЪаЫШЄЕуЩОГ§ НјШыаЫШЄЕуВщбЏЙІФмЃЌбЁдёдЄЩОГ§БЪЪ§БрКХЃЌдйГЄАД UP/DN МќЃЌПЩЩОГ§ИУБЪзљБъЃЌгявєЬсЪОЁАздНЈзљБъЩОГ§ЭъГЩЁБЁЃ
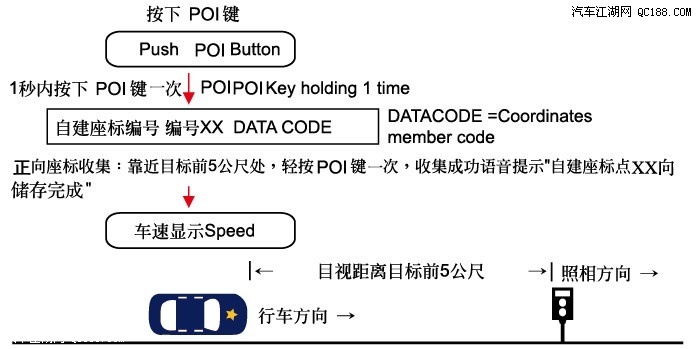
ЁЁЁЁPOI е§ЯђздНЈзљБъ ЮРаЧСЌНсКѓЃЌвбДядЄЖЈОрРыЃЌПЩПЊЪМЪеМЏздНЈзљБъЃЌНгНќЫГЯђМДгыааГЕЭЌЯђГЕЕРжЎееЯрЕуЛђздНЈзјБъЕу5ЙЋГпЧАЃЌвЛУыФкЧсАД POI Мќ 1 ДЮЃЌгявєЬсЪОЁАздНЈзљБъ**ЯђДЂДцЭъГЩЁБВЂЯдЪОзљБъЕуБрКХЁЃ
ЁЁЁЁЗДЯђздНЈзљБъ ЮРаЧСЌНсКѓЃЌМДПЩПЊЪМЪеМЏЗДЯђздНЈзљБъЃЌНгНќЗДЯђМДгыааГЕЗДЯђГЕЕРжЎееЯрЕуЛђздНЈзјБъЕу3ЙЋГпЧАЃЌСЌајАДPOIМќ2ДЮЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъ*ЯђДЂДцЭъГЩЁБВЂЯдЪОзљБъЕуБрКХЁЃ
ЁЁЁЁМнЪЛФЃЪНЧаЛЛ Д§ЛњзДЬЌЯТГжајАДзХ POI МќдМ 3-4 УыЃЌгявєЬсЪОАВШЋМнЪЛФЃЪНЃЌЕчзгТоХЬжааФаЧаЭзжЯћЪЇ;дйАД POI МќдМ 3-4 УыЃЌгявєЬсЪОееЯрЯЕЭГМнЪЛФЃЪНЃЌЕчзгТоХЬжааФаЧаЭзжКуСС
ЁЁЁЁВщбЏЙІФмжиВЅ НјШыШЮвЛВщбЏЙІФмЪБЃЌдйАДЯТ POI Мќ 1 ДЮЃЌЙІФмЬсЪОжиИДВЅБЈ
ЁЁЁЁЩОГ§ШЋВПаЫШЄЕу НјШыаЫШЄЕуВщбЏЪБЃЌдйГЄАД POI МќЃЌЪ§УыКѓЃЌЩОГ§ШЋВПаЫШЄЕуЃЌгявєЬсЪОЁАздНЈзљЪОЩОГ§ЭъГЩЁБЁЃ
ЁЁЁЁЛжИДдГЇЩшЖЈЙиЛњзДЬЌЃЌАДжјPOIМќВЛЗХЃЌВхЩЯЕчдДЃЌЭЈЕчКѓЗХЪжЃЌБуФмЬ§ЕНЛжИДдГЇЩшЖЈЕФгявєЬсЪО
ЁЁЁЁ(Ш§)ИќаТНЬбЇ
ЁЁЁЁ

ЁЁЁЁ
ЁЁЁЁ

ЁЁЁЁ(ЫФ)здНЈзљБъ
ЁЁЁЁ1 ЁЂе§ЯђаЫШЄЕузљБъЖЈЮЛЗНЗЈ
ЁЁЁЁ1-1ЪеМЏЗНЗЈЃКе§ЯђЖЈЮЛЃЌМДгыааНјЗНЯђЯрЭЌжЎздНЈзљБъЕФЪеМЏЃЌвРЖЈЫйбВКНЫйЖШОіЖЈЮДРДЕФОЏЪООрРыЃЌЫљвдПЭЛЇШчгћЪеМЏзљБъЪБЃЌПЩвдбЁдёЪЪЕБЕФбВ КНжЕЃЌЕБааЪЛГЕСОППНќФПБъЮяЧАДѓдМ 5 ЙЋГпЃЌЧсАДвЛДЮ poi ЪеМЏМќЃЌЯЕЭГЛсгагявєздНЈзљБъЕуЪеМЏЭъГЩЁЃ
ЁЁЁЁ1-2ЫГЯђЖЈЮЛВйзїЗНЗЈЃК
ЁЁЁЁ
ЁЁЁЁ1-3бВКНжЕгыЪеМЏОрРыЯрЖдВЮПМжЕ
ЁЁЁЁЖЈЫйбВКН ЪеМЏОрРы
ЁЁЁЁ1 10-30 ЙЋРя 150 ЙЋГп
ЁЁЁЁ2 40-60 ЙЋРя 300 ЙЋГп
ЁЁЁЁ3 0 Лђ 70-80 ЙЋРя 500 ЙЋГп
ЁЁЁЁ4 90 ЙЋРя 700 ЙЋГп
ЁЁЁЁ5 100-150 ЙЋРя 1000 ЙЋГп
ЁЁЁЁ2 ЁЂФцЯђаЫШЄЕузљБъЖЈЮЛЗНЗЈ
ЁЁЁЁ2-1ЪеМЏЗНЗЈ : ФцЯђЖЈЮЛЃЌМДгыааНјЗНЯђЯрЗДГЕЕРжЎздНЈзљБъЕФЪеМЏЃЌЕБааЪЛГЕСОППНќЖдЯђ( ЖдЯѓ )ЮяЙ§КѓдМ 3 ЙЋГпЃЌЧсАД 2 ДЮ POI ЪеМЏМќЃЌЯЕЭГЛсПЊЪМЯдЪООрРыЃЌгжгявєЗДЯђздНЈзљБъЦ№ЕуЃЌЕБГЕзгМЬајЭљЧАааЪЛЃЌНгзХЛсПЊЪММЦЫуОрРыжСОЏЪОЦ№ЕужЙЃЌЯЕЭГгявєЁАЗДЯђздНЈзљБъЕу -XX ЁБЯђЃЌДЂДцЭъГЩ ЁБ ЁЃ
ЁЁЁЁ2-2ФцЯђЖЈЮЛВйзїЗНЗЈЃК
ЁЁЁЁ

ЁЁЁЁ2-3аЫШЄЕуЪеМЏзЂвтЪТЯюЃК
ЁЁЁЁA.ЪеМЏздНЈзљБъЪБЃЌШчааЪЛТЗОЖОрРыаЁгкЫйЯоОЏЪООрРыЃЌЯЕЭГЛсГіЯж LES ЃЌЮоЗЈЪеМЏЁЃ
ЁЁЁЁB.ЕБМЧвфЬхвбТњ / ВЛзуЪБЃЌЮоЗЈдйДцДЂЪБЃЌЯЕЭГЛсГіЯж OER ЃЌЧыбЁдёЩОГ§ВЛБивЊЕФздНЈаЫШЄЕузљБъЁЃ(зюДѓДЂДцБЪЪ§ 256 БЪ)
ЁЁЁЁC.АДЯТ POI МќЃЌПЩЫГРћДцДЂздНЈаЫШЄЕуЃЌЭЌВНЯдЪОДЂДцБЪЪ§МАЮЛжУЃЌЕБдйЖШНјШыЯрЭЌЕФздНЈзљБъаЫШЄЕуЧјгђЪБЃЌГ§гявєЬсЪОЭтЃЌ СэгаБЪЪ§ЮЛжУЯдЪОЁЃ
ЁЁЁЁD.вЛУыФкСЌАДЯТ POI Мќ 2 ДЮЃЌЯЕЭГЛсздЖЏМЦЪ§ЫйЯоОЏЪООрРыЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъЦ№ЕуЁБЃЌЭЌЪБЯдЪООрРыЕЙЪ§ЃЌвбДядЄЩшОрРыЪБЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъДЂДцГЩЙІЁБВЂЯдЪОЕФЫГађБрКХЁЃ
ЁЁЁЁE..ФцЯђаЫШЄЕузљБъЖЈЮЛЪеМЏзјБъЕуЪБЃЌааЪЛТЗОЖОЁСПбгжјзХжїИЩЕРааЪЛЮЊжїЃЌЧыЮ№ЮДДяЕНЪеМЏОрРыМДзЊНјШыаЁОЖЃЌЗёдђПЩФмгАЯьЪеМЏЕФОЋШЗадЁЃ
ЁЁЁЁ3 ЁЂздНЈаЫШЄЕуМАЯЕЭГзљБъЯТдигыЩЯДЋЗНЗЈ
ЁЁЁЁ

ЁЁЁЁ4 ЁЂЯЕЭГзљБъИќаТЯТди
ЁЁЁЁгУЛЇЧыЕЧШы http://conqueror.gpscamera.org ЪзУцЃЌВЮееЯТдиСїГЬЫЕУїЃЌгУЛЇПЩвдЧсЫЩЭИЙ§ЭјТЗЛёЕУИќаТЁЃ
ЁЁЁЁ(Юх)GPSвьГЃОЏЪОзДЬЌ
ЁЁЁЁ

ЁЁЁЁ

ЁЁ
ЁЁЁЁ2013Фъ8дТ1Ше
ДѓТНТжЬЅЮДРДШ§ФъФкГтзЪ1вкХЗдЊЭиеЙгЁЖШвЕЮё