
数位语音播报/支持现在日期.时间查询 征服者NO.1产品介绍
 所属分类:GPS/DVD导航
2013-7-31 14:24:16 推荐指数:
所属分类:GPS/DVD导航
2013-7-31 14:24:16 推荐指数:



品 牌征服者 CONQUEROR
產品型號NO.1
用途分類一体机(GPS+RADAR)
主要功能★ 照相点完全单向接收
★ 数位语音播报
★ USB线上下载最新坐标资料
★ 可自行增设正、反向双点坐标,最多可达256笔
★ 车速误差微调设定
★ 车辆行进速度、照相点距离递减显示
★ 数位电子罗盘方位指示
★ 提醒收费站、休息站距离、隧道开头灯等百种功能
★ 全频雷达频率接收(X、K、Ka、Newk、Laser、VG-2接收)
★ 现在日期,时间查询
★ 简易恢复原厂设定
★ 运作、设定全语音提示
★ LED显示
尺寸(長 x 寬 x 高)
重量(g)
定額電壓DC12V
工作溫度-25 ℃ -75 ℃
更新網址http://conqueror.gpscamera.org
座標更新區域中國沿海 (V60xx)
中國西北 (V50xx)
更新下載模式将主机连接电脑,插上下载线即可进入下载模式
上市時間2009年10月
保修時間(年)1
■ 常见Q&A
常见问题及解决方法
■ 專用配件

主机

PUSH

下载线

磁铁

吸盘
温馨提示:
功能以手中实际为准,本手册仅供参考;
本产品仅供安全警示,请勿超速使用;
为了你的安全,请勿必参照实际的交通规则驾驶!
■ 基本功能
(一)功能说明
一 . 主机各部件功能位置说明

二. 主机启动显示说明
1. 开机启动程序
1-1开机时先进行显示荧幕测试,会播报欢迎词 [ 欢迎使用征服者全球卫星雷达系统,请系好安全带 ] 如图1

1-2目前 GPS 版本显示 如图2 。

1-3当地时间显示(12小时制) 如图3

1-4驾驶模式语音提示,预设值为 [ 安全驾驶限速模式 ]
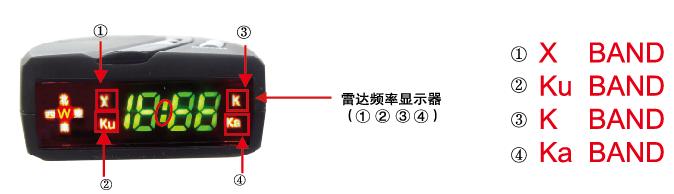
1-5雷达频率显示
当主机接收到雷达讯号时,显示幕会显示收到的雷达频率。
(在市区行驶时),当主机收到干扰信号时,主机也会显示干扰讯号频率
雷达频率的种类如下:
2. 卫星启动状态
2-1当卫星连接成功时,会先播报祝旅途平安。
2-2当机器处于卫星连结状态时,时间中的‘:'会持续闪烁(见图 ),反之当无法与卫星连接时,时间中的‘:'将不会持续闪烁,在无法与卫星连接的状态时,电子罗盘的东、西、南、北会持续轮流闪烁,同时无法显示当前时间;当与卫星连接时,若车子静止状态,只显示当前时间。若车子行驶状态则电子罗盘会依据车子行进的方向而显示方位,同时会显示当前时间。
三. 主机功能查询
1. 系统资讯查询与下载模式

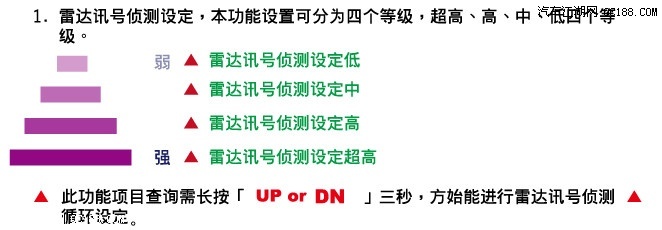
▲ 此功能项目查询需轻按【 MOD 】一秒,方能进入系统资讯循环查询
如需重复播报,请轻按【 MEM 】一秒.
1-1现在所在位置,此项目需在机器与卫星连接后,方能查询。机器会依据目前使用者所在方位播报经纬度与海拔高度,当车子处于行驶状态也会播报行驶方向。
1-2日期时间查询,此项目需在机器与卫星连结后,方能查询,会透过卫星来提示目前的日期时间。
1-3电瓶电压查询,会依据汽车目前的状况播报电瓶电压数值。
1-4系统更新模式,将主机连接计算机,系统显示dn。座标更新网址为 http://conqueror.gpscamera.org ,在更新之前须注意以下事项:
▲ 系统需求: WINDOWS XP ( SP1/SP2 )或 WINDOWS VISTA
▲ 软件需求:
WINDOWS XP ( SP1/SP2 )
1.DTL USB-TO-Serial
2.Microsoft installer 3.1
3.Microsoft.net framework 2.0
WINDOWS VISTA (X86)
1.DTL USB-TO-Serial(X86 专用 )
WINDOWS VISTA (X64)
1.DTL USB-TO-Serial(X64 专用 )
▲ 浏览器需求: Microsoft Internet Explorer
▲ 详见网站
四. 系统功能设定
1. 系统功能循环设定
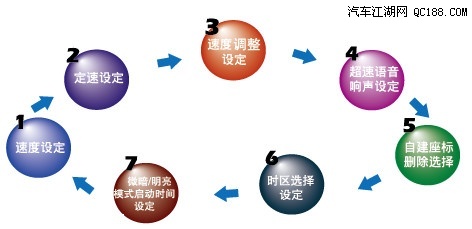
▲此功能项目查询需长按 【 MOD 】 三秒,方能进入系统功能循环设定,进入系统功能设定后,每按 【 MOD 】 一秒,就可循环选择设置系统功能,当设置完毕可长按 【 MOD】 三秒储存设定,或静待三秒即回到预设画面。
1-1速度设定 , 可设定范围从 0 公里 至 150 公里 。每次调整10公里,出厂预设值为 40 公里 ,即车速低于 40公里时,即使遇到电波式雷达雷达系统会自动静音,只会闪烁灯光,可排除市区中自动门与其它杂讯的干扰。
1-2定速设定 , 可设定范围从 0 公里 至 150 公里 ,每次调整为10公里,出厂预设值为 0 公里 ,即关闭此功能,如果设定为 100 公里 ,车速高于 100 公里 时,系统会自动发出超速警告,直到车速低于此设定值为此。关于此功能,亦能作为自建坐标点之警示点路段之速限,以及警示距离长度的采集依据。
1-3速度调整设定 , 可设定范围从 0 公里 至 20 公里 ,出厂预设值为 5 公里 ,当 GPS 速度与车子速度不一致时,可先行观查一般平均误差值,再调整至 GPS 速度与车子速度相近。
1-4超速语音响声设定 , 可调整为语音响声模式 -> 语音模式 -> 连续响声模式。出厂预设值为语音响声模式,三种语音响声警示的详细内容如下所示:
▲ 语音响声模式:在此模式下,当车子靠近因定照相系统警示点前,除了语音提示照相系统的种类,限速与距离倒数,当车速超过该照相系统速限值时,系统会自动发出【当当】警示声,当车速低于速限值时,系统将停止【当当】警示声,而持续距离倒数。
▲ 语音模式:在此模式下,当车子靠近固定照相系统警示点前,系统会语音提示照相系统的种类、限速与距离倒数,无论车子超过照相系统速限值与否,系统将不会发出【当当】的警示声。
▲ 连续响声模式:在此模式下,当车子靠近固定照相系统警示点前,系统会语音提示照相系统的种类、限速与距离倒数,无论车子超过照相系统速限值与否,系统将持续发出【当当】的警示声,直到车行经过固定照相系统警示点。
1-5自建座标删除选择 , 详见自建坐标教学说明
1-6时区选择设定 , 用户可按[UP]或[DN]时区选择加/减(循环),长按MEM键切换时钟/分钟选择加/减(循环)
1-7明亮模式启动时间设定 , 原厂预设值为AM 6:00,即在早上 6:00起,系统会自动调整荧幕亮度变亮。使用者可依据开车环境,而自行调整。
1-8微暗模式启动时间设定 , 原厂预设值为PM 6:00,即在晚上 6:00起,系统会自动调整荧幕亮度变暗。使用者可依据开车环境,而自行调整。
请注意,当明亮模式启动时间与微亮模式启动时间相同时,即是明亮/微暗模式关闭,即系统恒处于明亮设定。
五. 驾驶模式切换设定
▲ 此功能项目查询需长按【 MEM 】三秒,方能进入驾驶模式循环设定
▲
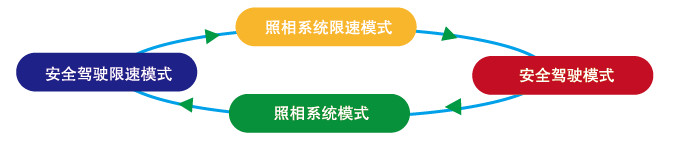
1-1安全驾驶限速模式在此驾驶模式下,系统除了提示使用者固定测速照相点的 限速与距离倒数 外,另外还会警示易肇事路段、商场、学校、加油站,收费站、让使用者更能掌握道路状况。
1-2照相系统限速模式在驾驶模式下,系统只会提示使用者所用固定测速照相点的 限速与距离倒数 ,不会警示易肇事路段、商场、学校、加油站,收费站等安全类提示。
1-3安全驾驶模式 同1-1功能叙述,但不会播报警示点路段速速限。
1-4照相系统模式同1-2功能叙述,但不会播报警示点路段速速限。
2.当遇到测速照相点时,警示器是如何提示:
2-1对于固定照相点警示器是通GPS定位来实现预警的。当汽车在行驶中,前方有固定照相点时,警示器会提前用中文播报【前方有固定测速照相,本路段限速。。公里】,当到达此固定照相点时会播报一个英文【camera】--这个单词是照相的意思。播报此声音时,表示此照相点警示已经结束。
2-2对于雷达测速警示器是通过即时接收雷达频率来预警的。当汽车行驶中,警示器接收到雷达信号,则会用英文播报接收
六 . 产品安装位置建议

七 . 雷达讯号侦测设定
八 . GPS 与一体机规格
主要规格接收频率范围
卫星接收频率 1.57542GHZ ± 1.023MHz-110 ± 2dB
警车 X-BAND 10.525GHz ± 100 MHz- 110 ± 2dB
三脚架 K-BAND 24.125GHz + 300 MHz
24.125GHz - 500 MHz -124 ± 2dB
证眼雷达 Ka-BAND 35.100GHz ± 100 MHz-115 ± 2dB
警车 Ka-BAND 34.700GHz ± 1300 MHz-115 ± 2dB
三脚架 Ka-BAND 34.300GHz ± 1300 MHz-115 ± 2dB
雷射枪 Laser Beam 904nm +33nm1.资料库容量: 360000 笔
2. 自建库容量: 256 笔
3.距离误差值:± 10 ( m )
4.距离显示: 0-999 ( m )
5.电子罗盘:东、西、南、北,东北、东南、西北、西南
反反侦测 VG2 11.150GHZ ± 175MHz
电源供应需求 DC12V
输出电流 <=300mA
工作温度 -25 ℃ -75 ℃
(二)恢复原厂设置
在主机关机状态下,先按MEM键,再插上电源,通电后放手,方能听到恢复原厂设定的语音提示。将个人设定值恢复到原厂出厂设定值。
(三)进入下载模式
▲ 系统更新教学 下载网址:http://conqueror.gpscamera.org
步骤一:
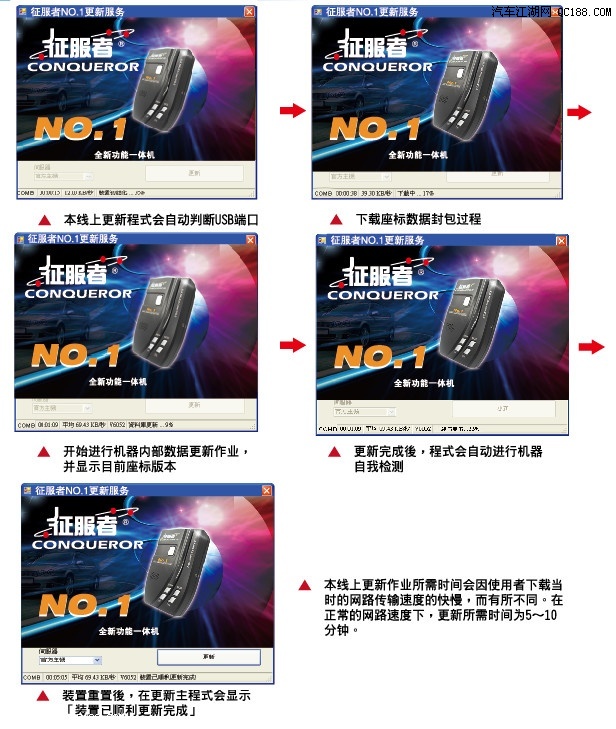
▲ 将主机连接至电脑,GPS主机切换到系统更新模式,屏幕显示“dn”
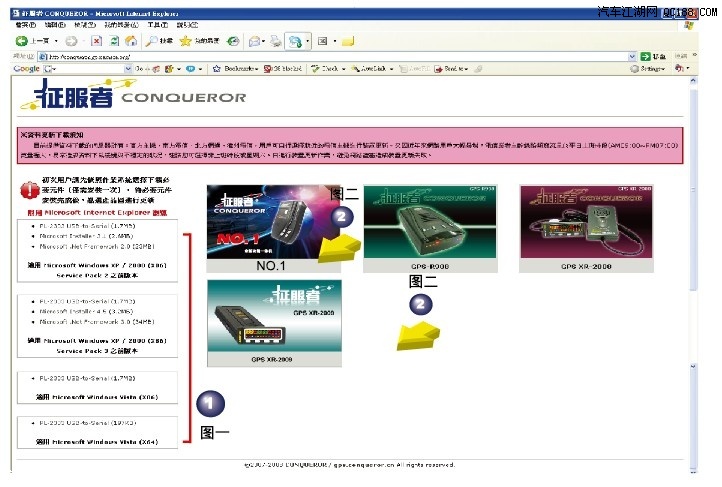
▲ 用户在下载前务必先确定电脑的WINDOWS的版本资讯,不同的WINDOWS版本有不同的更新座标数据所需软件,用户必须安装所需之软件并重新开机后,再点选该机型的图示,始能进行座标数据更新程序。
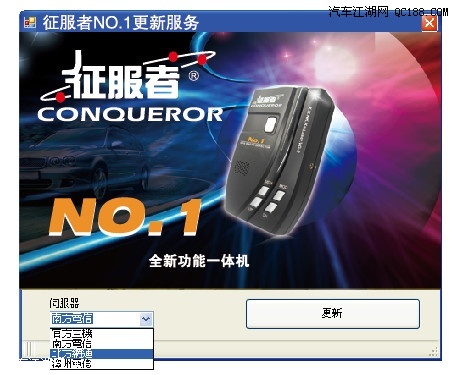
▲ 用户在进入线上更新程式时,请依据本身所在位置,选择斂伺服器进行下载,本产由于采用最新辨识系统,在下载前不需要进行任何注册,只要是本公司原厂出产之产品,再进行步骤二的程序后,即可按左图中的更新键开始下载。
(四)用户自建坐标教学
1 、自建座标功能介绍
本产品除了提供全国各大地区的固定照相与安全类警示座标点,尚内建 256 笔超大自建座标容量,供使用者自行增设座标警示点并依定速设定值决定警的距离,在设定完成后,当使用者日后行经过此自建座标点前,系统会提前提示【前方为自建座标点,请小心驾驶】并倒数距离显示(如果使用者是设定在限速模式下,则通过会提示【前方为自建座标点,限速 XX 公里,请小心驾驶】,在通过座标点时,系统会发出自建座标点结束声,此时显示屏会显示【 PASS 】。)
2 、自建座标收集方法
2.1 正向自建座标
即行车方向与照相方向同方向,定位方式如下图解:
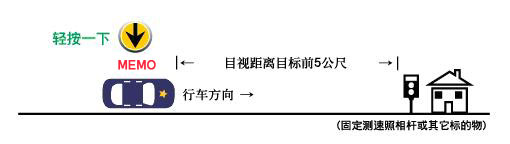
▲使用者只要距离目标物前 5 公尺,按一下【 MEM 】键,当系统收集完成后,【显示屏上会出现该坐标点的编号】(编号由0到255),并提示【自建座标。。设定完成】约 2 秒后,恢复车速显示。
2.2 反向自建座标
即行车方向与照相方向反方向,定位方式如下图解:
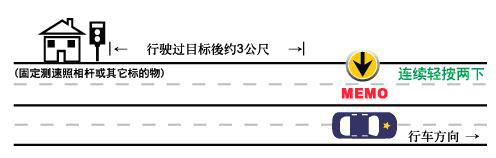
▲使用者只要距离目标物3 公尺后,连续轻按【MEMO】键两下,语音提示反向自建座标起点,当系统收集完成后,显示屏上会出现该自建点的编号(编号由0到255),并提示【反向自建座标。。设定完成】 2 秒后,恢复车速显示。
2.3 定速设定值与收集距离相对参考值
定速巡航收集距离
110-30 公里约150 公尺
240-60 公里约300 公尺
30 或 70-80 公里约500 公尺
490 公里 约700 公尺
5100-150 公里约1000 公尺
自建座标点的收集距离是依据定速设定的数值而决定的,例如,挡使用者将定速值设定为 0 公里 时,使用者的自建座标收集距离就是为 500 公尺 ,请参阅上图定速值与收集距离相对参考值图表。
2.4 自建座标收集注意事项:
▲收集正向自建座标点时,如行驶路径小于速限警示距离,系统会出现【 LES 】,此时无法收集正向自建座标点。例如,当定速值定为0公里时,使用者必需行驶超过500 公尺,才能开始收集正向自建座标点。当使用者要收集反向自建座标点时,则不会受行驶路径距离小于速限警示距离影响,可于连上卫星后,直接收集。
▲ 本产品自建座标点最大可储存 256 笔,当记忆体已满时,系统会出现【 OER 】,此时请先删除不必要的自建座标点。
2.5 自建座标点删除:
▲单笔座标删除:请先进入到自建座标删除选择功能设定,再按【 UP 】或【 DN 】选择至想要删除的座标点编号,再长按【 UP 】或【DN 】删除该笔自建座标点。
▲全部自建座标点删除:请先进入到自建座标删除选择功能设定,再长按【 MEMO】就可删除的全部自建座标点
2.6 用户自建座标点上传共享:
▲中国大陆道路建设日新月异,如果使用者发现到有新增的固定测速照相点或其它安全警示点,可以透过自建座标点收集的方式,将新增的固定测速照相点或其它安全警示点收集下来,再上传至本公司的用户自建座标管理网站。我们将尽快处理测试,让其它使用者分享到您的最新座标点。上传分享网址为:http://cp.gpscamera.org/
2013年8月13日
支持视频输入/蓝牙免提通话 佳明2565R导航实测