
照相点完全单向接收/数位语音播报 征服者A-886产品说明
 所属分类:GPS/DVD导航
2013-7-31 14:28:35 推荐指数:
所属分类:GPS/DVD导航
2013-7-31 14:28:35 推荐指数:





品 牌征服者 CONQUEROR
產品型號A-886
用途分類一體機 (GPS + RADAR)
主要按鍵UP
音量大聲
DN
音量小聲
FUN
功能切換
POI模式設定
尺寸(長 x 寬 x 高)
重量(g)
定額電壓12V
工作溫度-25 ~ 75 °
數據更新軟體Service Pack
更新網址http://conqueror.gpscamera.org
座標更新區域中國沿海 (V60xx)
中國西北 (V50xx)
更新下載模式FUN键切換進入
上市時間
建議售價
保修時間(年)1
■ 專用配件
GPS主机

电源线

USB下载线

磁铁

吸盘铁架
■ 功能简介
★ 照相点完全单向接收
★ 数位语音播报
★ USB线上下载最新坐标资料
★ 可自行增设正、反向双点坐标,最多可达256笔
★ 车速误差微调设定
★ 车辆行进速度、照相点距离递减显示
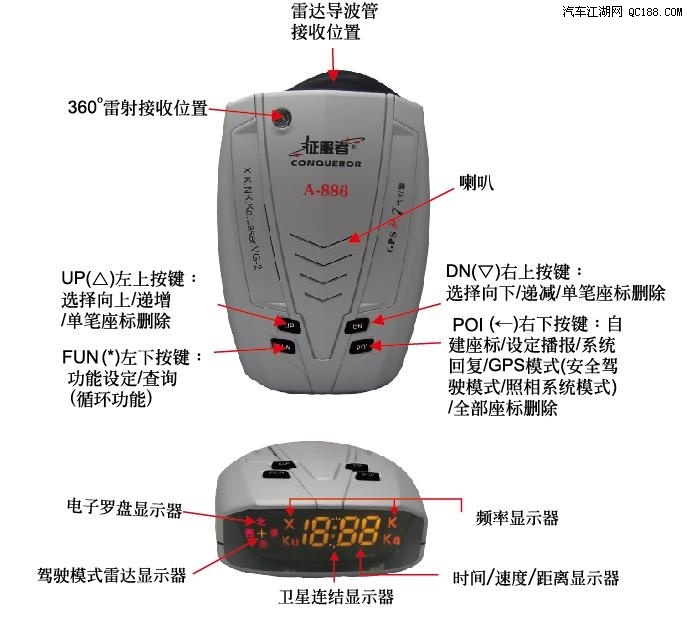
★ 数位电子罗盘方位指示
★ 提醒收费站、休息站距离、隧道开头灯等百种功能
★ 全频雷达频率接收(X、K、Ka、Newk、Laser、VG-2接收)
★ 现在日期,时间查询
★ 简易恢复原厂设定
★ 运作、设定全语音提示
★ 急难救助经纬海拔高度查询
★ 卫星讯号查询
★ 显示自动明亮度调整、设定
★ 开机长短欢迎词选择
★ 电瓶电压警示及查询
★ 里程记录,最高车速记录
★ LED显示
■ 常见Q&A
常见问题及解决方法
温馨提示:
功能以手中实际为准,本手册仅供参考;
本产品仅供安全警示,请勿超速使用;
为了你的安全,请勿必参照实际的交通规则驾驶!
■ 基本功能
(一)主要按键功能说明

1 . FUN 键功能说明
Up(△)左上按键:向上选择/感度调升/单笔座标删除
DN(▽)右上按键:向下选择/感度调降/单笔座标删除
FUN(*)左下按键:功能设定/功能查询/离开设定
Button功能动作调整及语音/显示器表现
FUN键雷达静
音设定持续按着FUN键3秒,进入功能设定模式,第1顺位语音播报 “雷达静音设定,目前设定50公里,无任何动作或按着FUN键,大约3-4秒确认后,跳回待机状态。每按UP键增加10公里;每按DN键减少10公里。
速度调整范围:0-150公里,
原厂预设值为50公里/小时,即车速低于50公里时,即使遇到电波式雷达系统会自动静音,只闪烁灯光,可排除市区中不当时的干扰。
巡航速度设定进入功能设定模式,第2顺位语音播报“巡航速度设定,目前设定0公里,无任何动作或按着FUN键,大约3-4秒确认后,跳回待机状态。每按UP键增加10公里;每按DN键减少10公里。
速度调整范围:0-150公里,
原厂预设值为0公里/小时,即关闭此功能,如设定为100公里,车速高于100公里时,系统会自发出超速警告,车速低于100公里,系统不发出超速警告。
车速误差微调设定进入功能设定模式,第4顺位语音播报“车速误差微调设定,目前设定0公里,无任何动作或按着FUN键,大约3-4秒确认后,跳回待机状态。每按UP键增加1公里;每按DN键减少1公里。
速度调整范围:0-20公里,原厂预设值为0公里/小时,如GPS速度与车子速度不一致,可先行观查一般平均误差值,再调整至GPS速度与车子速度完全一致。
语音响声设定进入功能设定模式,第5顺位语音播报“语音响声设定,目前设定语音响声模式,无任何动作或按着FUN键,大约3-4秒确认后,跳回待机状态。每按UP键向上循环;每按DN键向下循环。
调整范围:语音响声模式(C0)—>语音模式(C1)—>连续响声模式(C2)—>音乐模式(C3)—>语音响声模式(C0)
预设值为语音响声模式。
1.语音响声模式:当车子靠近固定照相杆,除语音提示照相杆外,车速超过固定杆的速限值以上,系统会发出超速“当当”警告;当车速低于固定照相杆速限值以下时,系统会自动静音与距离递减显示。
2.语音模式:当车子靠近固定照相杆,仅语音提示照相杆,系统会自动静音与距离递减显示。
3.连续响声模式:车子靠近固定照相杆,除语音提示照相杆外,不管是否超过固定照相速限值与否,系统会自动提示“当当”警告与距离递减显示。
4.音乐模式:当车子靠近固定照相杆,仅音乐提示照相杆,系统会自动静音与距离递减显示。
用户自建座标删除设定进入功能设定模式,第6顺位语音播报“自建座标删除选择,预设定0笔,选择自建座标编号,选择编号后,再按POI键后语音播报”自建座标删除完成,无任何动作或按着FUN键,大约3-4秒确认后,跳回待机状态。每按UP键增加1笔;每按DN键减少1笔。
原厂设定值为0笔,最大储存笔数255笔
单笔座标删除:选取欲删除之单一兴趣点时,再长按UP或DN键,可删除单笔自建座标点。
全部自建座标删除:进入兴趣点查询功能,再长长按POI键删除全部自建座标点,语音提示自建座标删除完成。
欢迎词选择设定进入功能设定模式,第9顺位语音播报“欢迎词选择设定,目前设定简短欢迎词,无任何动作或按着FUN键,大约3-4秒确认后,跳回待机状态。每按UP键向上循环;每按DN键向下循环。
调整范围:完整欢迎词(L)—>简短欢迎词(S)—>完整欢迎词(L)
原厂设定值为简短欢迎词,开机时会有简短功能设定语句。
明亮模式设定(早上)进入功能设定模式,第10顺位语音播报“明亮模式启时间设定,目前设定早上6:00,无任何动作或按着FUN键,大约3-4秒确认后,跳回待机状态。每按UP键增加1小时;每按DN键减少1小时。
调整范围:早上AM1:00-12:00
原厂预设值为是早上AM6:00时,即早上6:00起会自动调整FND亮度变亮
微暗模式设定(下午)进入功能设定模式,第11顺位语音播报“明亮模式启时间设定,目前设定下午6:00,无任何动作或按着FUN键,大约3-4秒确认后,跳回待机状态。每按UP键增加1小时;每按DN键减少1小时。
调整范围:下午PM1:00-12:00
原厂预设值为是下午PM6:00时,即下午6:00起会自动调整FND亮度变暗
2 . FUN 用户资讯查询功能
经纬度及海拔高度 / 最高旅程时速 / 卫星讯号查询 / 日期查询功能 / 累计旅程距离 / 总计旅程距离 / 目前电瓶电压 / 系统更新模式
Button 功能 动作 语音 / 显示器表现
FUN 键
经纬度及海拔高度 进入查询设定模式,轻按 FUN 键约一秒,第 1 顺位语音播报“ 现在所在位置查询“。仅于卫星连接成功时提供功能。 例如:现在所在位置北纬 24 度 12 分 05 秒东经 120 度 05 分 01 秒海拔高度 21.5 公尺(现在行车方向东北向)
最高旅程时速 进入查询设定模式,轻按 FUN 键约一秒,第 2 顺位语音播报“ 最高旅程时速 XX 公里“。 例如:最高旅程时速 120 公里
2007 年 8 月 10 时早上 10 点 00 分 00 秒
卫星讯号查询 进入查询设定模式,轻按 FUN 键约一秒,第 3 顺位语音播报“ 卫星连接信号“。仅于卫星连接成功时提供功能。 例如:卫得连接信号不良 / 普通 / 良好,限卫星已连结
日期查询功能 进入查询设定模式,轻按 FUN 键约一秒,第 4 顺位语音播报“ 现在时间“。仅于卫星连接成功时提供功能。 例如:现在时间 2007 年 8 月 10 日早上 10 点 00 分 00 秒,限卫星已连结
累计旅程距离 进入查询设定模式,轻按 FUN 键约一秒,第 5 顺位语音播报“ 目前累计旅程距离”。 例如累计旅程距离 159 公里
总计旅程距离 进入查询设定模式,轻按 FUN 键约一秒,第 6 顺位语音播报“ 目前总计旅程距离”。 总计旅程距离 1859 公里
目前电瓶电压 进入查询设定模式,轻按 FUN 键约一秒,第 8 顺位语音播报“ 目前 电瓶电压 ”。 目前电瓶电压 12 伏特
系统更新模式 进入查询设定模式,轻按 FUN 键约一秒,第 9 顺位语音播报“ 系统更新模式”。 进入系统更新资料驱动 / 座标 / 语言 / 产品内码等
3.FUN/POI 键功能说明
POI( -> ) 右下按键:兴趣点收集及删除功能
自建座标 / 设定播报 / 系统回复 /GPS 模式(安全驾驶模式 / 照相系统模式)
Button 功能 动作
DN
递减设定 于功能设定状态下,每次轻按 DN 键 1 次,为递减设定调整。
递减雷达感度设定 待机状态下,每次持续按着 DN 键约 3-4 秒,为感度等级递减设定调整。
递减音量
调整设定 待机状态下,每次轻按 DN 键约 1 秒,为递减音量调整设定,设定范围 0~15 级止。
UP 递增设定 于功能设定状态下,每次轻按 UP 键 1 次,为递增设定调整。
递增雷达
感度设定 待机状态下,每次持续按着 UP 键约 3-4 秒,为感度等级递增设定调整。
递增音量
调整设定 待机状态下,每次轻按 UP 键约 1 秒,为递增音量调整设定,设定范围 0~15 级止。
DN/UP 键 单笔兴趣点删除 进入兴趣点查询功能,选择预删除笔数编号,再长按 UP/DN 键,可删除该笔座标,语音提示“自建座标删除完成”。
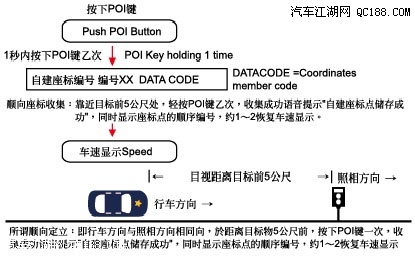
POI 顺向自建座标 卫星连结后,启始距离已达 500 公尺,可开始收集自建座标,接近顺向即与行车同向车道之照相点或兴趣点 5 公尺前,一秒内轻按 POI 键 1 次,语音提示“顺向自建座标储存完成”并显示座标点编号。
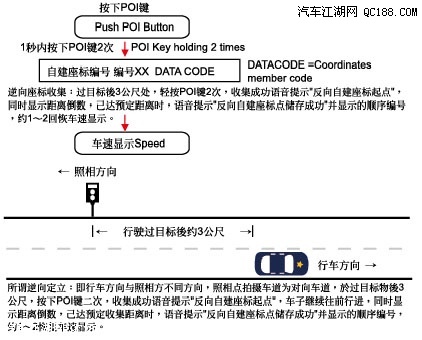
逆向自建座标 卫星连结后,启始距离已达 500 公尺,可开始收集自建座标,接近逆向即与行车反向车道之照相点或兴趣点过后 5 公尺,一秒内轻按 POI 键 2 次,语音提示“反向自建座标起点”并显示计算距离,已达预定距离时,语音提示“逆向自建座标储存完成”并显示座标点编号。
驾驶模式切换 待机状态下持续按着 POI 键约 3-4 秒,语音提示安全驾驶模式,电子罗盘中心星型字消失;再按 POI 键约 3-4 秒,语音提示照相系统模式,电子罗盘中心星型字恒亮。
查询功能重播 进入任一查询功能时,再按下 POI 键 1 次,功能提示重复播报
删除全部兴趣点 进入兴趣点查询时,再长按 POI 键,数秒后,删除全部兴趣点,语音提示“自建座示删除完成”。
(二)恢复原厂设置
关机状态后,先持续按右下角 POI 按键,再插上电源,通电后即可放开,开机语音讲完后大约 5-6 秒,听到“恢复原厂设定”时,就可以进行恢复原厂设定,但此时 并不是清除所有信息。
(三)更新教学
▲ 系统更新教学 下载网址:http://conqueror.gpscamera.org


(四)自建座标 教学
1 、顺向兴趣点座标定位方法
1-1收集方法:顺向定位,即与行进方向相同之自建座标的收集,依定速巡航速度决定未来的警示距离,所以客户如欲收集座标时,可以选择适当的巡 航值,当行驶车辆靠近目标物前大约 5 公尺,轻按一次 POI 收集键,系统会有语音自建座标点收集完成。
1-2顺向定位操作方法:
1-3巡航值与收集距离相对参考值
定速巡航 收集距离
1 10-30 公里 150 公尺
2 40-60 公里 300 公尺
3 0 或 70-80 公里 500 公尺
4 90 公里 700 公尺
5 100-150 公里 1000 公尺
2 、逆向兴趣点座标定位方法
2-1收集方法 : 逆向定位,即与行进方向相反车道之自建座标的收集,当行驶车辆靠近对向( 对象 )物过后约 3 公尺,轻按 2 次 POI 收集键,系统会开始显示距离,又语音反向自建座标起点,当车子继续往前行驶,接着会开始计算距离至警示起点止,系统语音“反向自建座标点 -XX ”向,储存完成 ” 。
2-2逆向定位操作方法:
2-3兴趣点收集注意事项:
A.收集自建座标时,如行驶路径距离小于速限警示距离,系统会出现 LES ,无法收集。
B.当记忆体已满 / 不足时,无法再存储时,系统会出现 OER ,请选择删除不必要的自建兴趣点座标。(最大储存笔数 255 笔)
C.按下 POI 键,可顺利存储自建兴趣点,同步显示储存笔数及位置,当再度进入相同的自建座标兴趣点区域时,除语音提示外, 另有笔数位置显示。
D.一秒内连按下 POI 键 2 次,系统会自动计数速限警示距离,语音提示“反向自建座标起点”,同时显示距离倒数,已达预设距离时,语音提示“反向自建座标储存成功”并显示 的 顺序编号。
E..逆向兴趣点座标定位收集坐标点时,行驶路径尽量延著 (着) 主干道行驶为主,请勿未达到收集距离即转进入小径,否则可能影响收集的精确性。
3 、自建兴趣点及系统座标下载与上传方法
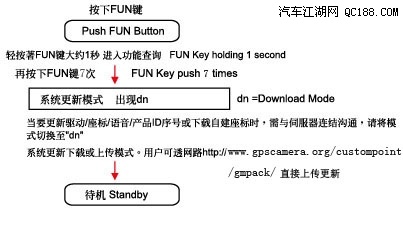
5 、系统座标更新下载
用户请登入 http://conqueror.gpscamera.org 首面,参照注册及下载流程说明,用户可以轻松透过新增删除座标系统,网路咨询获得更新。
2013年8月26日
影音娱乐功能不可小觑 纽曼本田CRV、丰田汉兰达车Pad上市