
РзДяеьВтЖржжЕШМЖЩшЖЈ/жЇГжгУЛЇздНЈзјБъ еїЗўепGPS-899+ВњЦЗЫЕУї
 ЫљЪєЗжРрЃКGPS/DVDЕМКН
2013-7-30 11:44:00 ЭЦМіжИЪ§ЃК
ЫљЪєЗжРрЃКGPS/DVDЕМКН
2013-7-30 11:44:00 ЭЦМіжИЪ§ЃК
ЁЁЁЁ
ЁЁЁЁ


ЁЁЁЁ


ЁЁЁЁЦЗЁЁЁЁХЦеїЗўеп CONQUEROR
ЁЁЁЁВњЦЗаЭКХGPS-899+
ЁЁЁЁгУЭОЗжРрРзДяГЌМгЧПЯЕСа
ЁЁЁЁжївЊАДМќЁя DN: бЁдёЯђЯТ/ ЕнМѕ/ЕЅБЪзљБъЩОГ§
ЁЁЁЁЁя UP: бЁдёЯђЩЯ/Енді/ЕЅБЪзљБъЩОГ§
ЁЁЁЁЁя POI:здНЈзљБъ/ЩшЖЈВЅБЈ/ЯЕЭГЛиИД/GPSФЃЪН(АВШЋМнЪЛФЃЪН/ееЯрЯЕЭГФЃЪН)/ШЋВПзљБъЩОГ§
ЁЁЁЁЁя FUN: ЙІФмЩшЖЈ/ВщбЏ(бЛЗЙІФм)
ЁЁЁЁГпДч(ГЄ x Пэ x Ип)
ЁЁЁЁжиСП(g)
ЁЁЁЁЖЈЖюЕчбЙDC12~24V
ЁЁЁЁЙЄзїиЖШ-25Ёц~75Ёц
ЁЁЁЁИќаТЭјжЗhttp://conqueror.gpscamera.org/
ЁЁЁЁзјБъИќаТЧјгђжајбиКЃ (V60xx)
ЁЁЁЁжајЮїББ (V50xx)
ЁЁЁЁИќаТЯТдиФЃЪННЋжїЛњСЌНгЕчФдЃЌВхЩЯЯТдиЯпМДПЩНјШыЯТдиФЃЪН
ЁЁЁЁЩЯЪаЪБМф2012Фъ3дТ
ЁЁЁЁБЃаоЪБМф(Фъ)1Фъ ЗЕЛиЙйЭјЪзвГ
ЁЁЁЁЁі ЛљБОЙІФм
ЁЁЁЁ(вЛ)ЙІФмЫЕУї
ЁЁЁЁвЛ . жїНсЙЙЯрЖдЮЛжУЫЕУї
ЁЁЁЁ

ЁЁЁЁЖў. GPSЦєЖЏзДЬЌ
ЁЁЁЁ1. ПЊЛњГЬађ
ЁЁЁЁ1-1ПЊЛњStart Power On
ЁЁЁЁ

ЁЁЁЁ1-2ШЋгЉФЛFNDВтЪдЃККЌЕчзгТоХЬ/РзДяЦЕТЪ/ОрРыЫйЖШЯдЪОЦї-ШЋССЯдЪО
ЁЁЁЁ

ЁЁЁЁ1-3ЛЖгДЪЃКЛЖгЪЙгУGPSАВШЋОЏЪОЯЕЭГЃЌЧыЯЕКУАВШЋДј!
ЁЁЁЁ1-4зљБъАцБОЃКФПЧАGPSАцБО ЁСЁСЁСЁС
ЁЁЁЁ

ЁЁЁЁ1-5МнЪЛФЃЪН(дЄЩш)ЃКАВШЋМнЪЛЯоЫйФЃЪН
ЁЁЁЁ1-6РзДяеьВтбЖКХ(дЄЩш)ЃКФПЧАРзДяеьВтбЖКХИпЁЃЪБМфЯдЪОЃКЮРаЧСЌНгЛсаЃзМЪБМф
ЁЁЁЁ

ЁЁЁЁ1-7ЮРаЧСЌНсГЩЙІЃКЯждкЪБМфЁСЁСЁСЁСФъЁСЁСдТЁСЁСШе дчЩЯ/ЯТЮчЁСЁСЕуЁСЁСЗжЁСЁСУы(НіЯогкЮРаЧСЌНсГЩЙІЪБВЅБЈ)
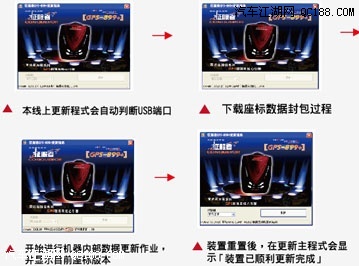
ЁЁЁЁ1-8РзДяЦЕТЪЯдЪО
ЁЁЁЁЕБжїЛњНгЪеЕНРзДябЖКХЪБЃЌЯдЪОФЛЖМЛсЯдЪОЪеЕНЕФРзДяЦЕТЪЁЃ
ЁЁЁЁдкЪаЧјааЪЛЪБЃЌЕБжїЛњЪеЕНИЩШХбЖКХЪБЃЌжїЛњвВЛсЯдЪОИЩШХбЖКХЦЕТЪЁЃ
ЁЁЁЁРзДяЦЕТЪЕФжжРрШчЯТЃК
ЁЁЁЁ
ЁЁЁЁ2. GPSМнЪЛФЃЪНЩшЖЈЃК
ЁЁЁЁПЩЧјЗжМИжжАВШЋЕШМЖЃКАВШЋМнЪЛФЃЪН(дЄЩшжЕ)/ееЯрЯЕЭГФЃЪН/ АВШЋМнЪЛЯоЫйФЃЪН/ееЯрЯЕЭГЯоЫйФЃЪН
ЁЁЁЁДЫЙІФмЯюФПВщбЏашГЄАДЁОPOIЁПШ§УыЃЌЗНЪМФмНјааМнЪЛФЃЪНбЛЗЩшЖЈЁЃ
ЁЁЁЁ1-1АВШЋМнЪЛЯоЫйФЃЪНЃЌдкДЫМнЪЛФЃЪНЃЌЯЕЭГГ§СЫЬсЪОЪЙгУепЙЬЖЈВтЫйееЯрЕуЕФЯоЫйгыОрРыЕЙЪ§ЭтЃЌСэЭтЛсЬсЧАОЏЪОвзеиЪТТЗЖЮЁЂЩЬГЁЁЂбЇаЃЁЂМггЭеОЁЂЪеЗбеОЃЌШУЪЙгУепИќФмеЦЮеЕРТЗзДПіЁЃ
ЁЁЁЁ1-2ееЯрЯЕЭГЯоЫйФЃЪНЃЌдкДЫМнЪЛФЃЪНЃЌЯЕЭГжЛЛсЬсЪОЪЙгУепЫљгаЙЬЖЈВтЫйееЯрЕуЕФЯоЫйгыОрРыЕЙЪ§ЃЌВЛЛсОЏЪОвзеиЪТТЗЖЮЁЂЩЬГЁЁЂбЇаЃЁЂМггЭеОЁЂЪеЗбеОЕШАВШЋРрЬсЪОЁЃ
ЁЁЁЁ1-3АВШЋМнЪЛФЃЪНЃЌЭЌ1-1.ЙІФма№ЪіЃЌЕЋВЛЛсВЅБЈИУОЏЪОЕуТЗЖЮЫйЯоЁЃ
ЁЁЁЁ1-4ееЯрЯЕЭГФЃЪНЃЌЭЌ1-2.ЙІФма№ЪіЃЌЕЋВЛЛсВЅБЈИУОЏЪОЕуТЗЖЮЫйЯоЁЃ
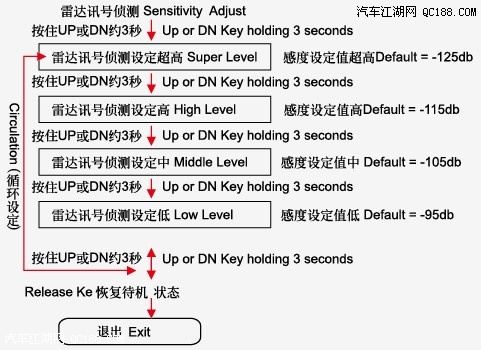
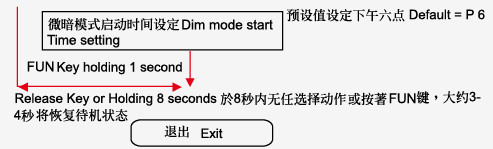
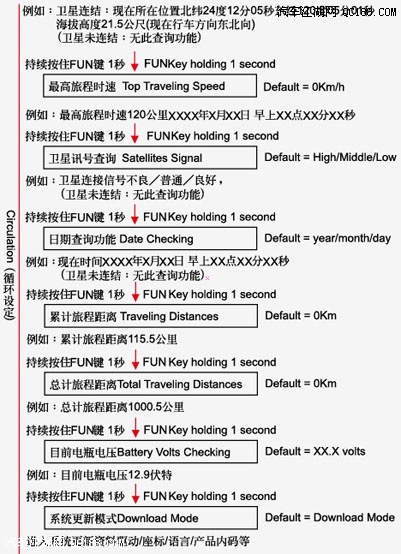
ЁЁЁЁ3. РзДяеьВтЩшЖЈЕШМЖЃКГЌИп/Ип/жа/ЕЭЫФИіЕШМЖ
ЁЁЁЁІг0РзДяеьВтЩшЖЈЕЭІГ1РзДяеьВтЩшЖЈжаІГ2РзДяеьВтЩшЖЈИпІГ3РзДяеьВтЩшЖЈГЌИп
ЁЁЁЁПЩЩшЖЈЗЖЮЇЃКГЌИп(Super) Ип(High) жа(Middle) ЕЭ(Low)
ЁЁЁЁ
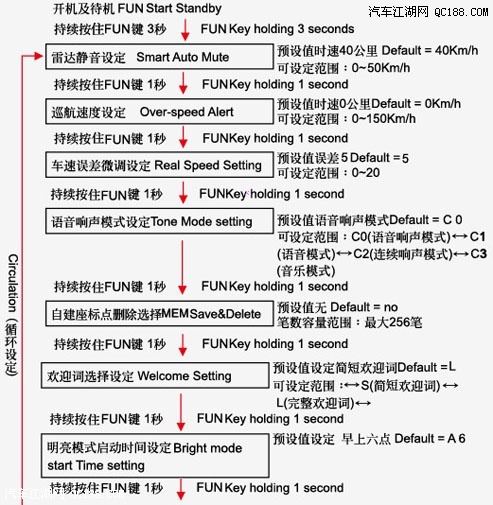
ЁЁЁЁШ§. ЙІФмЩшЖЈзДЬЌ
ЁЁЁЁЁј Д§ЛњзДЬЌ:
ЁЁЁЁЪБМфЃКЮРаЧСЌНсЭъГЩGPSВЅБЈЯждкЪБМфЁСЁСЁСЁСФъЁСдТЁСЁСШе ЯТЮчЁСЁСЕуЁСЁСЗжЁСЁСУыЁЃ
ЁЁЁЁЫйЖШЃКГЕзгвЦЖЏЃЌGPSЛсвРЪЕМЪГЕСОЯдЪОааЪЛЕФГЕЫйЃЌдЄЩшЮЊЙЋРя/ЪБЫйЯдЪОЁЃ
ЁЁЁЁОрРыЃКГЕзгППНќееЯрЕуЛђРзДя/РиЩфОГЃГіУЛТЗЖЮжЎОЏЪОЕуЃЌGPSЛсМЦЫуГіГЕзггыФПБъМфЕФОрРыЁЃ
ЁЁЁЁЗНЮЛЃКГЕзгвЦЖЏЃЌGPSЛсвРОнЪЕМЪЗНЮЛЯдЪОецЪЕЕФааГЕЗНЯђЁЃ
ЁЁЁЁЁј ЯЕЭГЙІФмЩшЖЈЃКДгЙІФмЩшЖЈПЊЪМжСД§ЛњзДЬЌбЛЗЪНЩшЖЈ
ЁЁЁЁ
ЁЁЁЁ
ЁЁЁЁЫФ. ЯЕЭГЙІФмЩшЖЈ
ЁЁЁЁ
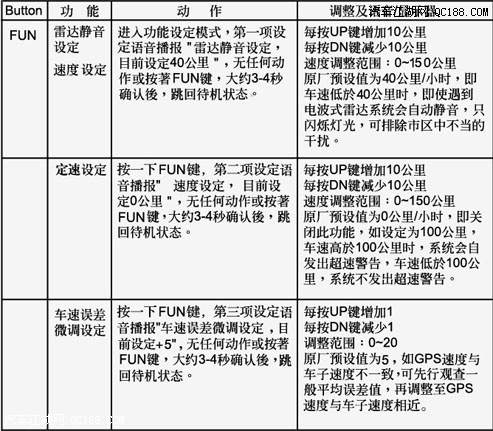
ЁЁЁЁUP(ІЄ)зѓЩЯАДМќЃКЯђЩЯбЁдё/ИаЖШЕїЩ§/ЕЅБЪзљБъЩОГ§
ЁЁЁЁDN(∇)гвЩЯАДМќЃКЯђЯТбЁдё/ИаЖШЕїНЕ/ЕЅБЪзљБъЩОГ§
ЁЁЁЁFUN(∗)зѓЯТАДМќЃКЙІФмЩшЖЈ/ЙІФмВщбЏ/РыПЊЩшЖЈ
ЁЁЁЁ

ЁЁЁЁUP(ІЄ)зѓЩЯАДМќЃКЯђЩЯбЁдё/ИаЖШЕїЩ§/ЕЅБЪзљБъЩОГ§
ЁЁЁЁDN(∇)гвЩЯАДМќЃКЯђЯТбЁдё/ИаЖШЕїНЕ/ЕЅБЪзљБъЩОГ§
ЁЁЁЁFUN(∗)зѓЯТАДМќЃКЙІФмЩшЖЈ/ЙІФмВщбЏ/РыПЊЩшЖЈ
ЁЁЁЁ
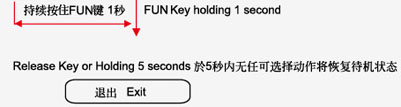
ЁЁЁЁЮх. жїЛњЙІФмВщбЏ
ЁЁЁЁ1. жїЛњЙІФмВщбЏЃКДгВщбЏПЊЪМжСД§ЛњзДЬЌбЛЗЪНВщбЏЃЌжївЊЬсЙЉгУЛЇЬиЩЋзЪбЖВщбЏЪЙгУПЊЪМжСД§ЛњзДЬЌFUNStart Standby
ЁЁЁЁ
ЁЁЁЁ
ЁЁЁЁ
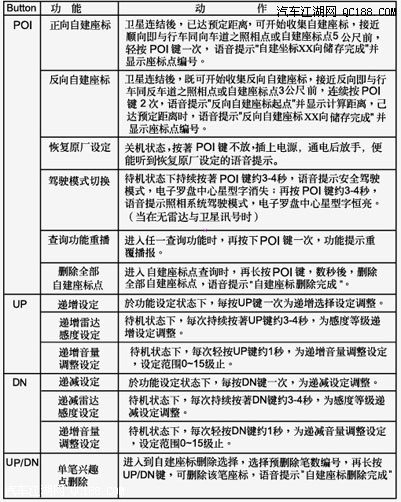
ЁЁЁЁ2. жїЛњЙІФмВщбЏЃКОЮГЖШМАКЃАЮИпЖШ/зюИпТУГЬЪБЫй/ЮРаЧбЖКХВщбЏ/ШеЦкВщбЏЙІФм/РлМЦТУГЬОрРы/змМЦТУГЬОрРы/ФПЧАЕчЦПЕчбЙ/ЯЕЭГИќаТФЃЪН
ЁЁЁЁ

ЁЁЁЁPOI(Ёћ)гвЯТАДМќЃКздНЈзљБъЕуЪеМЏМАЩОГ§ЙІФмЁЃздНЈзљБъ/ЩшЖЈВЅБЈ/ЯЕЭГЛиИД/GPSФЃЪН(АВШЋМнЪЛФЃЪН/ееЯрЯЕЭГФЃЪН)
ЁЁЁЁ
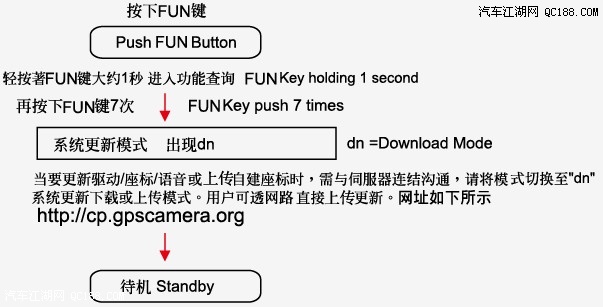
ЁЁЁЁ(Жў)НјШыЯТдиФЃЪН
ЁЁЁЁЁј ЯЕЭГИќаТНЬбЇ ЯТдиЭјжЗЃКhttp://gps.conqueror.cn/
ЁЁЁЁ
ЁЁЁЁЁј НЋжїЛњСЌНгжСЕчФдЃЌАДзЁFUNМќЃЌНЋЦфЧаЛЛжСЯЕЭГИќаТФЃЪНЃЌЦСФЛЯдЪО"dn"
ЁЁЁЁ

ЁЁЁЁЁј гУЛЇдкЯТдиЧАЮёБи,ЯШШЗЖЈЕчФдЕФWINDOWSЕФАцБОзЪбЖЃЌВЛЭЌЕФWINDOWSАцБОгаВЛЭЌЕФИќаТзљБъЪ§ОнЫљашжЎШэМўЃЌгУЛЇБиаыАВзАЫљашжЎШэМўВЂжиаТПЊЛњКѓЃЌдйЕубЁИУЛњаЭЕФЭМЪОЃЌЪМФмНјШызљБъЪ§ОнИќаТГЬађЁЃ
ЁЁЁЁ
ЁЁЁЁЁј гУЛЇдкНјШыЯпЩЯИќаТГЬЪНЪБЃЌЧывРОнБОЩэЫљдкЮЛжУЃЌбЁдёПЫХЗўЦїНјааЯТдиЃЌ БОВњЦЗгЩгкВЩгУзюаТБцБ№ЯЕЭГЃЌдкЯТдиЧАВЛашвЊдйНјааШЮКЮзЂВсЃЌжЛвЊЪЧБОЙЋЫОдГЇГіВњжЎВњЦЗЃЌдйНјаа ВНжшЖў ЕФГЬађКѓЃЌМДПЩАДЭМжаЕФИќаТПЊЪМЯТдиЁЃ
ЁЁЁЁ(Ш§)гУЛЇздНЈзјБъНЬбЇ
ЁЁЁЁ1 ЁЂЯЕЭГзљБъИќаТЯТди
ЁЁЁЁгУЛЇЧыЕЧШы http://gps.conqueror.cn ЪзУцЃЌВЮееЯТдиСїГЬЫЕУїЃЌгУЛЇПЩвдЧсЫЩЭИЙ§ЭјТчЛёЕУИќаТЁЃ
ЁЁЁЁ2 ЁЂздНЈзљБъЪеМЏЗНЗЈ
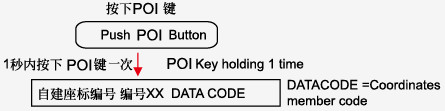
ЁЁЁЁ2.1 е§ЯђздНЈзљБъЖЈЮЛЗНЗЈ
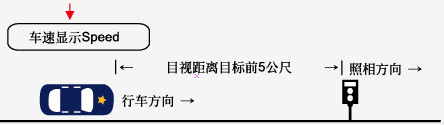
ЁЁЁЁЁјЪеМЏЗНЗЈЃКе§ЯђЖЈЮЛЃЌМДгыааНјЗНЯђЯрЭЌжЎздНЈзљБъЕФЪеМЏЃЌвРЖЈЫйбВКНЫйЖШОіЖЈЮДРДЕФОЏЪООрРыЃЌЫљвдПЭЛЇШчгћЪеМЏзљБъЪБЃЌПЩвдбЁдёЪЪЕБЕФбВКНжЕЃЌЕБааЪЛГЕСОППНќФПБъЮяЧАДѓдМ5ЙЋГпЃЌЧсАДвЛДЮPOIМќЃЌЯЕЭГЛсгагявєЁАздНЈзљБъЕуЁСЁСЯђДЂДцЭъГЩЁБ
ЁЁЁЁ2.2 е§ЯђЖЈЮЛВйзїЗНЗЈЃК
ЁЁЁЁ
ЁЁЁЁе§ЯђзљБъЪеМЏЃКППНќФПБъЧА5ЙЋГпДІЃЌЧсАДMEMМќвЛДЮЃЌЪеМЏГЩЙІгявєЬсЪОЁАздНЈзљБъЕуЁСЁСЯђДЂДцЭъГЩЁБ
ЁЁЁЁ
ЁЁЁЁЁјЫљЮНе§ЯђЖЈСЂЃКМДааГЕЗНЯђгыееЯрЗНЯђЯрЭЌЯђЃЌЪЙгУепФПЪггыОрРыФПБъЮя5ЙЋГпЧАЃЌАДЯТPOIМќвЛДЮЃЌЪеМЏГЩЙІгявєЬсЪОЁАздНЈзљБъЕуДЂДцГЩЙІЁБЃЌЭЌЪБЯдЪОзљБъЕуЕФЫГађБрКХЃЌдМ1~2УыЛжИДГЕЫйЯдЪОЁЃ
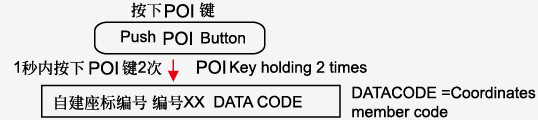
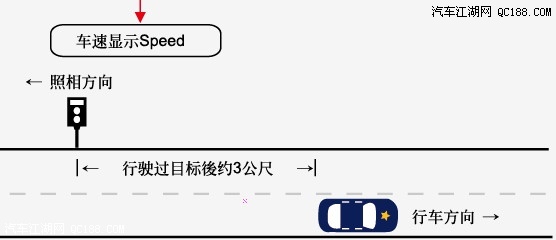
ЁЁЁЁ2.3 ЗДЯђздНЈзљБъЕуЖЈЮЛЗНЗЈЃК
ЁЁЁЁЁјЪеМЏЗНЗЈЃКЗДЯђЖЈЮЛЃЌМДгыааНјЗНЯђЯрЗДГЕЕРжЎздНЈзљБъЕФЪеМЏЃЌЕБааЪЛГЕСОППНќЖдЯѓФПБъЮяЙ§КѓдМ3ЙЋГпЃЌЧсАД2ДЮPOIЪеМЏМќЃЌЯЕЭГЛсПЊЪМЯдЪООрРыЃЌгагявєЁАЗДЯђздНЈзљБъЦ№ЕуЁБЃЌЕБГЕзгМЬајЭљЧАааЪЛЃЌНгзХЛсПЊЪММЦЫуОрРыжСОЏЪОЦ№ЕужЙЃЌЯЕЭГгявєЁАЗДЯђздНЈзљБъЕу ЁСЁС ЯђДцДЂЭъГЩЁБ
ЁЁЁЁ
ЁЁЁЁЗДЯђзљБъЪеМЏЃКЙ§ФПБъКѓ3ЙЋГпДІЃЌЧсАДPOIМќ2ДЮЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъЦ№ЕуЁБЃЌЭЌЪБЯдЪООрРыЃЌвбДядЄЖЈОрРыЪБЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъЕуЁСЁСЯђДцДЂЭъГЩЁБВЂЯдЪОЕФздНЈзљБъЕуБрКХЃЌдМ1~2УыЛжИДГЕЫйЯдЪОЁЃ
ЁЁЁЁ
ЁЁЁЁЁјЫљЮНЗДЯђЖЈСЂЃКМДааГЕЗНЯђгыееЯрЗНЯђВЛЭЌЗНЯђЃЌееЯрЕуХФЩуГЕЕРЮЊЗДЯђГЕЕРЃЌгкЙ§ФПБъЮяКѓ3ЙЋГпЃЌЧсАДЯТPOIМќЖўДЮЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъЦ№ЕуЁБЃЌГЕзгМЬајЭљЧАааНјЃЌЭЌЪБЯдЪООрРыЃЌвбДядЄЖЈЪеМЏОрРыЪБЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъЕуЁСЁСЯђДцДЂЭъГЩЁБВЂЯдЪОздНЈзљБъЕуЕФБрКХЃЌдМ1~2УыЛжИДГЕЫйЯдЪОЁЃ
ЁЁЁЁ2.4 ЖЈЫйЩшЖЈжЕгыЪеМЏОрРыЯрЖдВЮПМжЕ
ЁЁЁЁЖЈЫйбВКН(ЯоЫй)ЪеМЏОрРы(гыФПБъЮяЕФОрРы)
ЁЁЁЁ110-30 ЙЋРядМ150 ЙЋГп
ЁЁЁЁ240-60 ЙЋРядМ300 ЙЋГп
ЁЁЁЁ30 Лђ 70-80 ЙЋРядМ500 ЙЋГп
ЁЁЁЁ490 ЙЋРя дМ700 ЙЋГп
ЁЁЁЁ5100-150 ЙЋРядМ1000 ЙЋГп
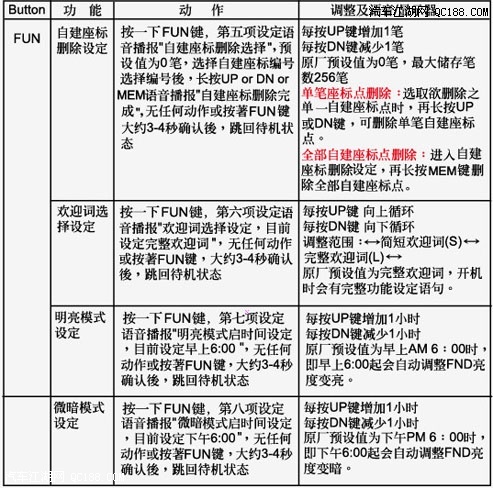
ЁЁЁЁ2.5 здНЈзљБъЕуЪеМЏзЂвтЪТЯюЃК
ЁЁЁЁA.ЪеМЏздНЈзљБъЪБЃЌШчааЪЛТЗОЖОрРыаЁгкЫйЯоОЏЪООрРыЃЌЯЕЭГЛсГіЯжLESЃЌЮоЗЈЪеМЏЁЃ
ЁЁЁЁB.ЕБМЧвфЬхвбТњ/ВЛзуЪБЃЌЮоЗЈдйДЂДцЪБЃЌЯЕЭГЛсГіЯжOERЃЌЧыбЁдёЩОГ§ВЛБивЊЕФздНЈзљБъЕузљБъЁЃ(зюДѓДцДЂБЪЪ§256БЪ)
ЁЁЁЁC.АДЯТPOIМќЃЌПЩЫГРћДцДЂздНЈзљБъЕуЃЌЭЌВНЯдЪОДцДЂБЪЪ§МАЮЛжУЃЌЕБдйЖШНјШыЯрЭЌЕФздНЈзљБъЕуЧјгђЪБЃЌГ§гявєЬсЪОЭтЃЌСэгаБЪЪ§ЮЛжУЯдЪОЁЃ
ЁЁЁЁD.вЛУыФкСЌАДЯТPOIМќ2ДЮЃЌЯЕЭГЛсздЖЏМЦЪ§ЫйЯоОЏЪООрРыЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъЦ№ЕуЁБЃЌЭЌЪБЯдЪООрРыЕЙЪ§ЃЌвбДядЄЖЈОрРыЪБЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъЕуЁСЁСЁБЯђДцДЂЭъГЩЃЌВЂЯдЪОздНЈзљБъЕуЕФЫГађБрКХЁЃ
ЁЁЁЁE.ЗДЯђздНЈзљБъЖЈЮЛЪеМЏзљБъЕуЪБЃЌааЪЛТЗОЖОЁСПбгжјжїИЩЕРааЪЛЮЊжїЃЌЧыЮ№ЮДДяЕНЪеМЏОрРыМДзЊНјШыаЁОЖЃЌЗёдђПЩФмгАЯьЪеМЏЕФОЋШЗадЁЃ
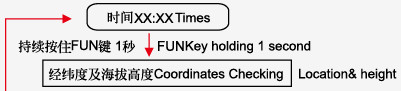
ЁЁЁЁ2.6 здНЈзљБъЕуЩОГ§ЃК
ЁЁЁЁ
ЁЁ
2013Фъ12дТ2Ше
ЭтЙлгыЙІФмЕФЭъУРНсКЯ ЩёааепGT70ШЋИпЧхааГЕМЧТМвЧЦРВт