
ПЩздаадіЩше§ЁЂЗДЯђЫЋЕузјБъ/жЇГжЕчЦПЕчбЙОЏЪОМАВщбЏ еїЗўепID8ВњЦЗНщЩм
 ЫљЪєЗжРрЃКGPS/DVDЕМКН
2013-7-31 16:17:33 ЭЦМіжИЪ§ЃК
ЫљЪєЗжРрЃКGPS/DVDЕМКН
2013-7-31 16:17:33 ЭЦМіжИЪ§ЃК
ЁЁЁЁ

ЁЁЁЁ
ЁЁЁЁ

ЁЁЁЁ
ЁЁЁЁ

ЁЁЁЁ

ЁЁЁЁЦЗЁЁЁЁХЦеїЗўеп CONQUEROR
ЁЁЁЁЎaЦЗаЭЬGPS-ID8
ЁЁЁЁгУЭОЗжювЛѓwC (GPS + RADAR)
ЁЁЁЁжївЊАДцIUP
ЁЁЁЁвєСПДѓТ
ЁЁЁЁDN
ЁЁЁЁвєСПаЁТ
ЁЁЁЁFUN
ЁЁЁЁЙІФмЧаQ
ЁЁЁЁPOIФЃЪНдOЖЈ
ЁЁЁЁГпДч(щL x x Ип)
ЁЁЁЁжиСП(g)
ЁЁЁЁЖЈю~ыК12V
ЁЁЁЁЙЄзїиЖШ-25 ~ 75 Ёу
ЁЁЁЁЕўИќаТмѓwService Pack
ЁЁЁЁИќаТОWжЗhttp://conqueror.gpscamera.org
ЁЁЁЁзљЫИќаТ ^гђжајбиКЃ (V60xx)
ЁЁЁЁжајЮїББ (V50xx)
ЁЁЁЁИќаТЯТнdФЃЪНFUNМќЧаQпMШы
ЁЁЁЁЩЯЪаrщg
ЁЁЁЁНЈзhЪлr
ЁЁЁЁБЃаоrщg(Фъ)1
ЁЁЁЁЁі ЃгУХфМў
ЁЁЁЁ

ЁЁЁЁGPSжїЛњ
ЁЁЁЁ

ЁЁЁЁЕчдДЯп
ЁЁЁЁ

ЁЁЁЁUSBЯТдиЯп
ЁЁЁЁ

ЁЁЁЁДХЬњ
ЁЁЁЁ

ЁЁЁЁЮќХЬЬњМм
ЁЁЁЁЮТмАЬсЪОЃК
ЁЁЁЁЙІФмвдЪжжаЪЕМЪЮЊзМЃЌБОЪжВсНіЙЉВЮПМ;
ЁЁЁЁБОВњЦЗНіЙЉАВШЋОЏЪОЃЌЧыЮ№ГЌЫйЪЙгУ;
ЁЁЁЁЮЊСЫФуЕФАВШЋЃЌЧыЮ№БиВЮееЪЕМЪЕФНЛЭЈЙцдђМнЪЛ!
ЁЁЁЁЁі ЙІФмМђНщ
ЁЁЁЁЁя ееЯрЕуЭъШЋЕЅЯђНгЪе
ЁЁЁЁЁя Ъ§ЮЛгявєВЅБЈ
ЁЁЁЁЁя USBЯпЩЯЯТдизюаТзјБъзЪСЯ
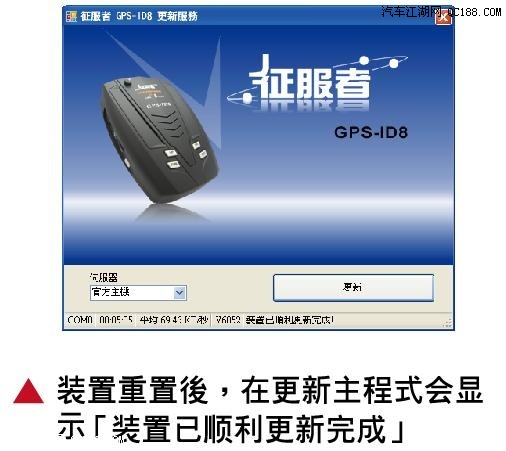
ЁЁЁЁЁя ПЩздаадіЩше§ЁЂЗДЯђЫЋЕузјБъЃЌзюЖрПЩДя256БЪ
ЁЁЁЁЁя ГЕЫйЮѓВюЮЂЕїЩшЖЈ
ЁЁЁЁЁя ГЕСОааНјЫйЖШЁЂееЯрЕуОрРыЕнМѕЯдЪО
ЁЁЁЁЁя Ъ§ЮЛЕчзгТоХЬЗНЮЛжИЪО
ЁЁЁЁЁя ЬсабЪеЗбеОЁЂанЯЂеООрРыЁЂЫэЕРПЊЭЗЕЦЕШАйжжЙІФм
ЁЁЁЁЁя ШЋЦЕРзДяЦЕТЪНгЪе(XЁЂKЁЂKaЁЂNewkЁЂLaserЁЂVG-2НгЪе)
ЁЁЁЁЁя ЯждкШеЦкЃЌЪБМфВщбЏ
ЁЁЁЁЁя МђвзЛжИДдГЇЩшЖЈ
ЁЁЁЁЁя дЫзїЁЂЩшЖЈШЋгявєЬсЪО
ЁЁЁЁЁя МБФбОШжњОЮГКЃАЮИпЖШВщбЏ
ЁЁЁЁЁя ЮРаЧбЖКХВщбЏ
ЁЁЁЁЁя ЯдЪОздЖЏУїССЖШЕїећЁЂЩшЖЈ
ЁЁЁЁЁя ПЊЛњГЄЖЬЛЖгДЪбЁдё
ЁЁЁЁЁя ЕчЦПЕчбЙОЏЪОМАВщбЏ
ЁЁЁЁЁя РяГЬМЧТМЃЌзюИпГЕЫйМЧТМ
ЁЁЁЁЁя LEDЯдЪО
ЁЁЁЁЁі ГЃМћQ&A
ЁЁЁЁГЃМћЮЪЬтМАНтОіЗНЗЈ
ЁЁЁЁЁі ЛљБОЙІФм
ЁЁЁЁ(вЛ)жївЊАДМќЙІФмЫЕУї
ЁЁЁЁ1 . FUN МќЙІФмЫЕУї
ЁЁЁЁUp(Ёї)зѓЩЯАДМќЃКЯђЩЯбЁдё/ИаЖШЕїЩ§/ЕЅБЪзљБъЩОГ§
ЁЁЁЁDN(Ј)гвЩЯАДМќЃКЯђЯТбЁдё/ИаЖШЕїНЕ/ЕЅБЪзљБъЩОГ§
ЁЁЁЁFUN(*)зѓЯТАДМќЃКЙІФмЩшЖЈ/ЙІФмВщбЏ/РыПЊЩшЖЈ
ЁЁЁЁButtonЙІФмЖЏзїЕїећМАгявє/ЯдЪОЦїБэЯж
ЁЁЁЁFUNМќРзДяОВ
ЁЁЁЁвєЩшЖЈГжајАДзХFUNМќ3УыЃЌНјШыЙІФмЩшЖЈФЃЪНЃЌЕк1ЫГЮЛгявєВЅБЈ ЁАРзДяОВвєЩшЖЈЃЌФПЧАЩшЖЈ50ЙЋРяЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќдіМг10ЙЋРя;УПАДDNМќМѕЩй10ЙЋРяЁЃ
ЁЁЁЁЫйЖШЕїећЗЖЮЇЃК0-150ЙЋРяЃЌ
ЁЁЁЁдГЇдЄЩшжЕЮЊ50ЙЋРя/аЁЪБЃЌМДГЕЫйЕЭгк50ЙЋРяЪБЃЌМДЪЙгіЕНЕчВЈЪНРзДяЯЕЭГЛсздЖЏОВвєЃЌжЛЩСЫИЕЦЙтЃЌПЩХХГ§ЪаЧјжаВЛЕБЪБЕФИЩШХЁЃ
ЁЁЁЁбВКНЫйЖШЩшЖЈНјШыЙІФмЩшЖЈФЃЪНЃЌЕк2ЫГЮЛгявєВЅБЈЁАбВКНЫйЖШЩшЖЈЃЌФПЧАЩшЖЈ0ЙЋРяЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќдіМг10ЙЋРя;УПАДDNМќМѕЩй10ЙЋРяЁЃ
ЁЁЁЁЫйЖШЕїећЗЖЮЇЃК0-150ЙЋРяЃЌ
ЁЁЁЁдГЇдЄЩшжЕЮЊ0ЙЋРя/аЁЪБЃЌМДЙиБеДЫЙІФмЃЌШчЩшЖЈЮЊ100ЙЋРяЃЌГЕЫйИпгк100ЙЋРяЪБЃЌЯЕЭГЛсздЗЂГіГЌЫйОЏИцЃЌГЕЫйЕЭгк100ЙЋРяЃЌЯЕЭГВЛЗЂГіГЌЫйОЏИцЁЃ
ЁЁЁЁГЕЫйЮѓВюЮЂЕїЩшЖЈНјШыЙІФмЩшЖЈФЃЪНЃЌЕк4ЫГЮЛгявєВЅБЈЁАГЕЫйЮѓВюЮЂЕїЩшЖЈЃЌФПЧАЩшЖЈ0ЙЋРяЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќдіМг1ЙЋРя;УПАДDNМќМѕЩй1ЙЋРяЁЃ
ЁЁЁЁЫйЖШЕїећЗЖЮЇЃК0-20ЙЋРяЃЌдГЇдЄЩшжЕЮЊ0ЙЋРя/аЁЪБЃЌШчGPSЫйЖШгыГЕзгЫйЖШВЛвЛжТЃЌПЩЯШааЙлВщвЛАуЦНОљЮѓВюжЕЃЌдйЕїећжСGPSЫйЖШгыГЕзгЫйЖШЭъШЋвЛжТЁЃ
ЁЁЁЁгявєЯьЩљЩшЖЈНјШыЙІФмЩшЖЈФЃЪНЃЌЕк5ЫГЮЛгявєВЅБЈЁАгявєЯьЩљЩшЖЈЃЌФПЧАЩшЖЈгявєЯьЩљФЃЪНЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќЯђЩЯбЛЗ;УПАДDNМќЯђЯТбЛЗЁЃ
ЁЁЁЁЕїећЗЖЮЇЃКгявєЯьЩљФЃЪН(C0)ЁЊ>гявєФЃЪН(C1)ЁЊ>СЌајЯьЩљФЃЪН(C2)ЁЊ>вєРжФЃЪН(C3)ЁЊ>гявєЯьЩљФЃЪН(C0)
ЁЁЁЁдЄЩшжЕЮЊгявєЯьЩљФЃЪНЁЃ
ЁЁЁЁ1.гявєЯьЩљФЃЪНЃКЕБГЕзгППНќЙЬЖЈееЯрИЫЃЌГ§гявєЬсЪОееЯрИЫЭтЃЌГЕЫйГЌЙ§ЙЬЖЈИЫЕФЫйЯожЕвдЩЯЃЌЯЕЭГЛсЗЂГіГЌЫйЁАЕБЕБЁБОЏИц;ЕБГЕЫйЕЭгкЙЬЖЈееЯрИЫЫйЯожЕвдЯТЪБЃЌЯЕЭГЛсздЖЏОВвєгыОрРыЕнМѕЯдЪОЁЃ
ЁЁЁЁ2.гявєФЃЪНЃКЕБГЕзгППНќЙЬЖЈееЯрИЫЃЌНігявєЬсЪОееЯрИЫЃЌЯЕЭГЛсздЖЏОВвєгыОрРыЕнМѕЯдЪОЁЃ
ЁЁЁЁ3.СЌајЯьЩљФЃЪНЃКГЕзгППНќЙЬЖЈееЯрИЫЃЌГ§гявєЬсЪОееЯрИЫЭтЃЌВЛЙмЪЧЗёГЌЙ§ЙЬЖЈееЯрЫйЯожЕгыЗёЃЌЯЕЭГЛсздЖЏЬсЪОЁАЕБЕБЁБОЏИцгыОрРыЕнМѕЯдЪОЁЃ
ЁЁЁЁ4.вєРжФЃЪНЃКЕБГЕзгППНќЙЬЖЈееЯрИЫЃЌНівєРжЬсЪОееЯрИЫЃЌЯЕЭГЛсздЖЏОВвєгыОрРыЕнМѕЯдЪОЁЃ
ЁЁЁЁгУЛЇздНЈзљБъЩОГ§ЩшЖЈНјШыЙІФмЩшЖЈФЃЪНЃЌЕк6ЫГЮЛгявєВЅБЈЁАздНЈзљБъЩОГ§бЁдёЃЌдЄЩшЖЈ0БЪЃЌбЁдёздНЈзљБъБрКХЃЌбЁдёБрКХКѓЃЌдйАДPOIМќКѓгявєВЅБЈЁБздНЈзљБъЩОГ§ЭъГЩЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќдіМг1БЪ;УПАДDNМќМѕЩй1БЪЁЃ
ЁЁЁЁдГЇЩшЖЈжЕЮЊ0БЪЃЌзюДѓДЂДцБЪЪ§255БЪ
ЁЁЁЁЕЅБЪзљБъЩОГ§ЃКбЁШЁгћЩОГ§жЎЕЅвЛаЫШЄЕуЪБЃЌдйГЄАДUPЛђDNМќЃЌПЩЩОГ§ЕЅБЪздНЈзљБъЕуЁЃ
ЁЁЁЁШЋВПздНЈзљБъЩОГ§ЃКНјШыаЫШЄЕуВщбЏЙІФмЃЌдйГЄГЄАДPOIМќЩОГ§ШЋВПздНЈзљБъЕуЃЌгявєЬсЪОздНЈзљБъЩОГ§ЭъГЩЁЃ
ЁЁЁЁЛЖгДЪбЁдёЩшЖЈНјШыЙІФмЩшЖЈФЃЪНЃЌЕк9ЫГЮЛгявєВЅБЈЁАЛЖгДЪбЁдёЩшЖЈЃЌФПЧАЩшЖЈМђЖЬЛЖгДЪЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќЯђЩЯбЛЗ;УПАДDNМќЯђЯТбЛЗЁЃ
ЁЁЁЁЕїећЗЖЮЇЃКЭъећЛЖгДЪ(L)ЁЊ>МђЖЬЛЖгДЪ(S)ЁЊ>ЭъећЛЖгДЪ(L)
ЁЁЁЁдГЇЩшЖЈжЕЮЊМђЖЬЛЖгДЪЃЌПЊЛњЪБЛсгаМђЖЬЙІФмЩшЖЈгяОфЁЃ
ЁЁЁЁУїССФЃЪНЩшЖЈ(дчЩЯ)НјШыЙІФмЩшЖЈФЃЪНЃЌЕк10ЫГЮЛгявєВЅБЈЁАУїССФЃЪНЦєЪБМфЩшЖЈЃЌФПЧАЩшЖЈдчЩЯ6ЃК00ЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќдіМг1аЁЪБ;УПАДDNМќМѕЩй1аЁЪБЁЃ
ЁЁЁЁЕїећЗЖЮЇЃКдчЩЯAM1ЃК00-12ЃК00
ЁЁЁЁдГЇдЄЩшжЕЮЊЪЧдчЩЯAM6ЃК00ЪБЃЌМДдчЩЯ6ЃК00Ц№ЛсздЖЏЕїећFNDССЖШБфСС
ЁЁЁЁЮЂАЕФЃЪНЩшЖЈ(ЯТЮч)НјШыЙІФмЩшЖЈФЃЪНЃЌЕк11ЫГЮЛгявєВЅБЈЁАУїССФЃЪНЦєЪБМфЩшЖЈЃЌФПЧАЩшЖЈЯТЮч6ЃК00ЃЌЮоШЮКЮЖЏзїЛђАДзХFUNМќЃЌДѓдМ3-4УыШЗШЯКѓЃЌЬјЛиД§ЛњзДЬЌЁЃУПАДUPМќдіМг1аЁЪБ;УПАДDNМќМѕЩй1аЁЪБЁЃ
ЁЁЁЁЕїећЗЖЮЇЃКЯТЮчPM1ЃК00-12ЃК00
ЁЁЁЁдГЇдЄЩшжЕЮЊЪЧЯТЮчPM6ЃК00ЪБЃЌМДЯТЮч6ЃК00Ц№ЛсздЖЏЕїећFNDССЖШБфАЕ
ЁЁЁЁ2 . FUN гУЛЇзЪбЖВщбЏЙІФм
ЁЁЁЁОЮГЖШМАКЃАЮИпЖШ / зюИпТУГЬЪБЫй / ЮРаЧбЖКХВщбЏ / ШеЦкВщбЏЙІФм / РлМЦТУГЬОрРы / змМЦТУГЬОрРы / ФПЧАЕчЦПЕчбЙ / ЯЕЭГИќаТФЃЪН
ЁЁЁЁButton ЙІФм ЖЏзї гявє / ЯдЪОЦїБэЯж
ЁЁЁЁFUN Мќ
ЁЁЁЁОЮГЖШМАКЃАЮИпЖШ НјШыВщбЏЩшЖЈФЃЪНЃЌЧсАД FUN МќдМвЛУыЃЌЕк 1 ЫГЮЛгявєВЅБЈЁА ЯждкЫљдкЮЛжУВщбЏЁАЁЃНігкЮРаЧСЌНгГЩЙІЪБЬсЙЉЙІФмЁЃ Р§ШчЃКЯждкЫљдкЮЛжУББЮГ 24 ЖШ 12 Зж 05 УыЖЋО 120 ЖШ 05 Зж 01 УыКЃАЮИпЖШ 21.5 ЙЋГп(ЯждкааГЕЗНЯђЖЋББЯђ)
ЁЁЁЁзюИпТУГЬЪБЫй НјШыВщбЏЩшЖЈФЃЪНЃЌЧсАД FUN МќдМвЛУыЃЌЕк 2 ЫГЮЛгявєВЅБЈЁА зюИпТУГЬЪБЫй XX ЙЋРяЁАЁЃ Р§ШчЃКзюИпТУГЬЪБЫй 120 ЙЋРя
ЁЁЁЁ2007 Фъ 8 дТ 10 ЪБдчЩЯ 10 Еу 00 Зж 00 Уы
ЁЁЁЁЮРаЧбЖКХВщбЏ НјШыВщбЏЩшЖЈФЃЪНЃЌЧсАД FUN МќдМвЛУыЃЌЕк 3 ЫГЮЛгявєВЅБЈЁА ЮРаЧСЌНгаХКХЁАЁЃНігкЮРаЧСЌНгГЩЙІЪБЬсЙЉЙІФмЁЃ Р§ШчЃКЮРЕУСЌНгаХКХВЛСМ / ЦеЭЈ / СМКУЃЌЯоЮРаЧвбСЌНс
ЁЁЁЁШеЦкВщбЏЙІФм НјШыВщбЏЩшЖЈФЃЪНЃЌЧсАД FUN МќдМвЛУыЃЌЕк 4 ЫГЮЛгявєВЅБЈЁА ЯждкЪБМфЁАЁЃНігкЮРаЧСЌНгГЩЙІЪБЬсЙЉЙІФмЁЃ Р§ШчЃКЯждкЪБМф 2007 Фъ 8 дТ 10 ШедчЩЯ 10 Еу 00 Зж 00 УыЃЌЯоЮРаЧвбСЌНс
ЁЁЁЁРлМЦТУГЬОрРы НјШыВщбЏЩшЖЈФЃЪНЃЌЧсАД FUN МќдМвЛУыЃЌЕк 5 ЫГЮЛгявєВЅБЈЁА ФПЧАРлМЦТУГЬОрРыЁБЁЃ Р§ШчРлМЦТУГЬОрРы 159 ЙЋРя
ЁЁЁЁзмМЦТУГЬОрРы НјШыВщбЏЩшЖЈФЃЪНЃЌЧсАД FUN МќдМвЛУыЃЌЕк 6 ЫГЮЛгявєВЅБЈЁА ФПЧАзмМЦТУГЬОрРыЁБЁЃ змМЦТУГЬОрРы 1859 ЙЋРя
ЁЁЁЁФПЧАЕчЦПЕчбЙ НјШыВщбЏЩшЖЈФЃЪНЃЌЧсАД FUN МќдМвЛУыЃЌЕк 8 ЫГЮЛгявєВЅБЈЁА ФПЧА ЕчЦПЕчбЙ ЁБЁЃ ФПЧАЕчЦПЕчбЙ 12 ЗќЬи
ЁЁЁЁЯЕЭГИќаТФЃЪН НјШыВщбЏЩшЖЈФЃЪНЃЌЧсАД FUN МќдМвЛУыЃЌЕк 9 ЫГЮЛгявєВЅБЈЁА ЯЕЭГИќаТФЃЪНЁБЁЃ НјШыЯЕЭГИќаТзЪСЯЧ§ЖЏ / зљБъ / гябд / ВњЦЗФкТыЕШ
ЁЁЁЁ3.FUN/POI МќЙІФмЫЕУї
ЁЁЁЁPOI( -> ) гвЯТАДМќЃКаЫШЄЕуЪеМЏМАЩОГ§ЙІФм
ЁЁЁЁздНЈзљБъ / ЩшЖЈВЅБЈ / ЯЕЭГЛиИД /GPS ФЃЪН(АВШЋМнЪЛФЃЪН / ееЯрЯЕЭГФЃЪН)
ЁЁЁЁButton ЙІФм ЖЏзї
ЁЁЁЁDN
ЁЁЁЁЕнМѕЩшЖЈ гкЙІФмЩшЖЈзДЬЌЯТЃЌУПДЮЧсАД DN Мќ 1 ДЮЃЌЮЊЕнМѕЩшЖЈЕїећЁЃ
ЁЁЁЁЕнМѕРзДяИаЖШЩшЖЈ Д§ЛњзДЬЌЯТЃЌУПДЮГжајАДзХ DN МќдМ 3-4 УыЃЌЮЊИаЖШЕШМЖЕнМѕЩшЖЈЕїећЁЃ
ЁЁЁЁЕнМѕвєСП
ЁЁЁЁЕїећЩшЖЈ Д§ЛњзДЬЌЯТЃЌУПДЮЧсАД DN МќдМ 1 УыЃЌЮЊЕнМѕвєСПЕїећЩшЖЈЃЌЩшЖЈЗЖЮЇ 0~15 МЖжЙЁЃ
ЁЁЁЁUP ЕндіЩшЖЈ гкЙІФмЩшЖЈзДЬЌЯТЃЌУПДЮЧсАД UP Мќ 1 ДЮЃЌЮЊЕндіЩшЖЈЕїећЁЃ
ЁЁЁЁЕндіРзДя
ЁЁЁЁИаЖШЩшЖЈ Д§ЛњзДЬЌЯТЃЌУПДЮГжајАДзХ UP МќдМ 3-4 УыЃЌЮЊИаЖШЕШМЖЕндіЩшЖЈЕїећЁЃ
ЁЁЁЁЕндівєСП
ЁЁЁЁЕїећЩшЖЈ Д§ЛњзДЬЌЯТЃЌУПДЮЧсАД UP МќдМ 1 УыЃЌЮЊЕндівєСПЕїећЩшЖЈЃЌЩшЖЈЗЖЮЇ 0~15 МЖжЙЁЃ
ЁЁЁЁDN/UP Мќ ЕЅБЪаЫШЄЕуЩОГ§ НјШыаЫШЄЕуВщбЏЙІФмЃЌбЁдёдЄЩОГ§БЪЪ§БрКХЃЌдйГЄАД UP/DN МќЃЌПЩЩОГ§ИУБЪзљБъЃЌгявєЬсЪОЁАздНЈзљБъЩОГ§ЭъГЩЁБЁЃ
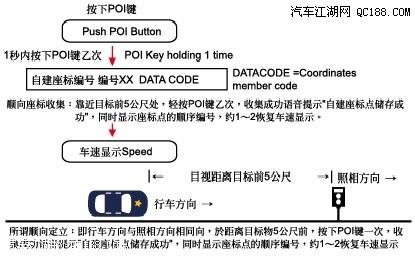
ЁЁЁЁPOI ЫГЯђздНЈзљБъ ЮРаЧСЌНсКѓЃЌЦєЪМОрРывбДя 500 ЙЋГпЃЌПЩПЊЪМЪеМЏздНЈзљБъЃЌНгНќЫГЯђМДгыааГЕЭЌЯђГЕЕРжЎееЯрЕуЛђаЫШЄЕу 5 ЙЋГпЧАЃЌвЛУыФкЧсАД POI Мќ 1 ДЮЃЌгявєЬсЪОЁАЫГЯђздНЈзљБъДЂДцЭъГЩЁБВЂЯдЪОзљБъЕуБрКХЁЃ
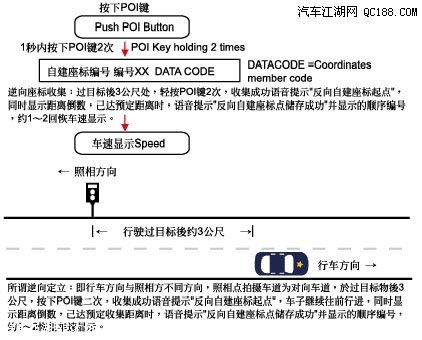
ЁЁЁЁФцЯђздНЈзљБъ ЮРаЧСЌНсКѓЃЌЦєЪМОрРывбДя 500 ЙЋГпЃЌПЩПЊЪМЪеМЏздНЈзљБъЃЌНгНќФцЯђМДгыааГЕЗДЯђГЕЕРжЎееЯрЕуЛђаЫШЄЕуЙ§Кѓ 5 ЙЋГпЃЌвЛУыФкЧсАД POI Мќ 2 ДЮЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъЦ№ЕуЁБВЂЯдЪОМЦЫуОрРыЃЌвбДядЄЖЈОрРыЪБЃЌгявєЬсЪОЁАФцЯђздНЈзљБъДЂДцЭъГЩЁБВЂЯдЪОзљБъЕуБрКХЁЃ
ЁЁЁЁМнЪЛФЃЪНЧаЛЛ Д§ЛњзДЬЌЯТГжајАДзХ POI МќдМ 3-4 УыЃЌгявєЬсЪОАВШЋМнЪЛФЃЪН;дйАД POI МќдМ 3-4 УыЃЌгявєЬсЪОееЯрЯЕЭГФЃЪНЁЃ
ЁЁЁЁВщбЏЙІФмжиВЅ НјШыШЮвЛВщбЏЙІФмЪБЃЌдйАДЯТ POI Мќ 1 ДЮЃЌЙІФмЬсЪОжиИДВЅБЈ
ЁЁЁЁЩОГ§ШЋВПаЫШЄЕу НјШыаЫШЄЕуВщбЏЪБЃЌдйГЄАД POI МќЃЌЪ§УыКѓЃЌЩОГ§ШЋВПаЫШЄЕуЃЌгявєЬсЪОЁАздНЈзљЪОЩОГ§ЭъГЩЁБЁЃ
ЁЁЁЁ(Жў)ЛжИДдГЇЩшжУ
ЁЁЁЁЙиЛњзДЬЌКѓ,ЯШГжајАДгвЯТНЧ POI АДМќЃЌдйВхЩЯЕчдДЃЌЭЈЕчКѓМДПЩЗХПЊЃЌПЊЛњгявєНВЭъКѓДѓдМ 5-6 УыЃЌЬ§ЕНЁАЛжИДдГЇЩшЖЈЁБЪБЃЌОЭПЩвдНјааЛжИДдГЇЩшЖЈЃЌЕЋДЫЪБ ВЂВЛЪЧЧхГ§ЫљгааХЯЂЁЃ
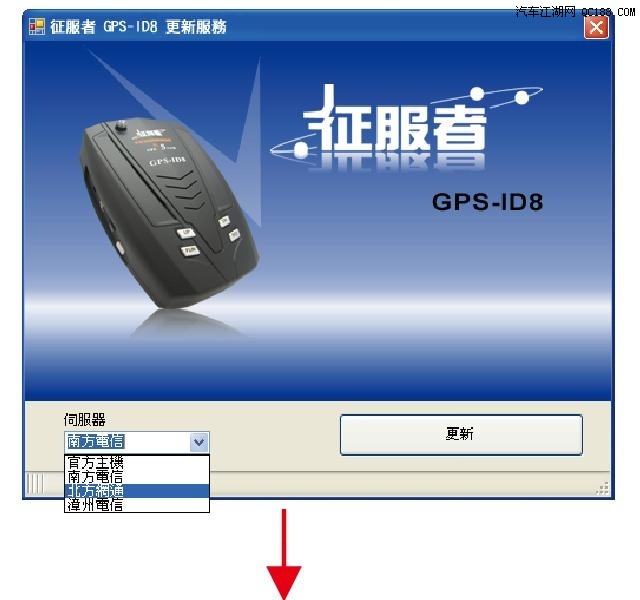
ЁЁЁЁ(Ш§)ИќаТНЬбЇ
ЁЁЁЁЁј ЯЕЭГИќаТНЬбЇ ЯТдиЭјжЗЃКhttp://conqueror.gpscamera.org
ЁЁЁЁВНжшвЛЃК
ЁЁЁЁЁј НЋжїЛњСЌНгжСЕчФдЃЌАДзЁFUNМќЃЌНЋЦфЧаЛЛжСЯЕЭГИќаТФЃЪНЃЌЦСФЛЯдЪОЁАdnЁБ
ЁЁЁЁ

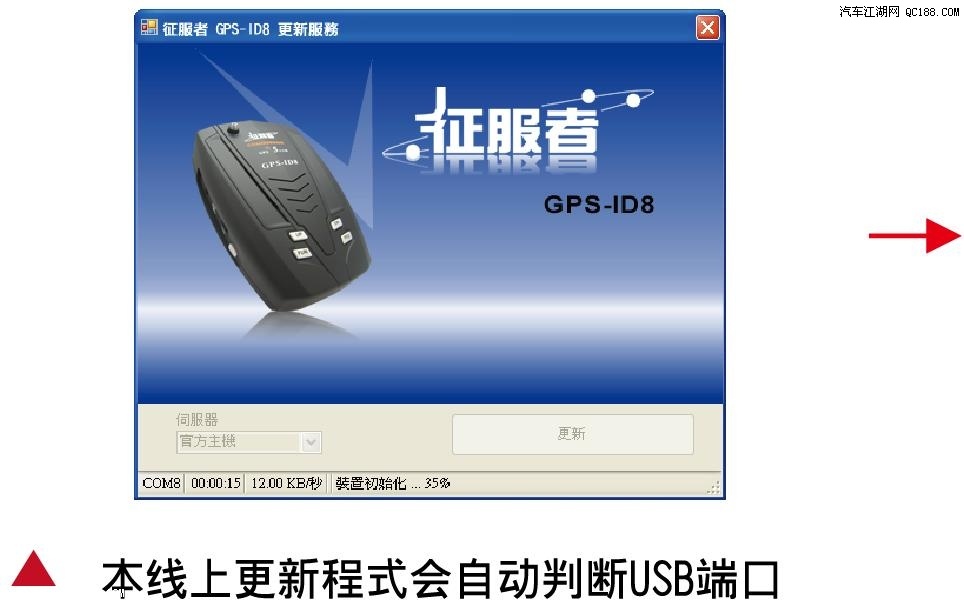
ЁЁЁЁВНжшЖўЃК
ЁЁЁЁЁј гУЛЇдкЯТдиЧАЮёБиЯШШЗЖЈЕчФдЕФWINDOWSЕФАцБОзЪбЖЃЌВЛЭЌЕФWINDOWSАцБОгаВЛЭЌЕФИќаТзљБъЪ§ОнЫљашШэМўЃЌгУЛЇБиаыАВзАЫљашжЎШэМўВЂжиаТПЊЛњКѓЃЌдйЕубЁИУЛњаЭЕФЭМЪОЃЌЪМФмНјаазљБъЪ§ОнИќаТГЬађЁЃ
ЁЁЁЁ
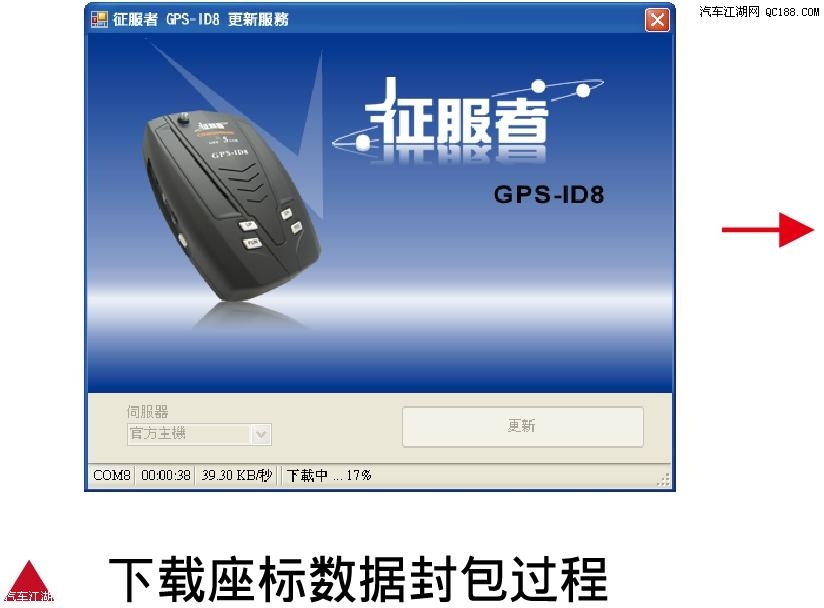
ЁЁЁЁВНжшШ§ЃК
ЁЁЁЁЁј гУЛЇдкНјШыЯпЩЯИќаТГЬЪНЪБЃЌЧывРОнБОЩэЫљдкЮЛжУЃЌбЁдёПЫХЗўЦїНјааЯТдиЃЌФПЧАга[ФЯЗНЫХЗўЦїЁЂББЗНЫХЗўЦїЁЂЙйЗНЫХЗўЦїЁЂеФжнЫХЗўЦї]ПЩЙЉбЁдёЃЌБОВњгЩгкВЩгУзюаТБцЪЖЯЕЭГЃЌдкЯТдиЧАВЛашвЊНјааШЮКЮзЂВсЃЌжЛвЊЪЧБОЙЋЫОдГЇГіВњжЎВњЦЗЃЌдйНјааВНжшвЛЕФГЬађКѓЃЌМДПЩАДзѓЭМжаЕФИќаТМќПЊЪМЯТдиЁЃ
ЁЁЁЁ
ЁЁЁЁ
ЁЁЁЁ

ЁЁЁЁ
ЁЁЁЁ(ЫФ)здНЈзљБъ НЬбЇ
ЁЁЁЁ1 ЁЂЫГЯђаЫШЄЕузљБъЖЈЮЛЗНЗЈ
ЁЁЁЁ1-1ЪеМЏЗНЗЈЃКЫГЯђЖЈЮЛЃЌМДгыааНјЗНЯђЯрЭЌжЎздНЈзљБъЕФЪеМЏЃЌвРЖЈЫйбВКНЫйЖШОіЖЈЮДРДЕФОЏЪООрРыЃЌЫљвдПЭЛЇШчгћЪеМЏзљБъЪБЃЌПЩвдбЁдёЪЪЕБЕФбВ КНжЕЃЌЕБааЪЛГЕСОППНќФПБъЮяЧАДѓдМ 5 ЙЋГпЃЌЧсАДвЛДЮ POI ЪеМЏМќЃЌЯЕЭГЛсгагявєздНЈзљБъЕуЪеМЏЭъГЩЁЃ
ЁЁЁЁ1-2ЫГЯђЖЈЮЛВйзїЗНЗЈЃК
ЁЁЁЁ
ЁЁЁЁ1-3бВКНжЕгыЪеМЏОрРыЯрЖдВЮПМжЕ
ЁЁЁЁЖЈЫйбВКН ЪеМЏОрРы
ЁЁЁЁ1 10-30 ЙЋРя 150 ЙЋГп
ЁЁЁЁ2 40-60 ЙЋРя 300 ЙЋГп
ЁЁЁЁ3 0 Лђ 70-80 ЙЋРя 500 ЙЋГп
ЁЁЁЁ4 90 ЙЋРя 700 ЙЋГп
ЁЁЁЁ5 100-150 ЙЋРя 1000 ЙЋГп
ЁЁЁЁ2 ЁЂФцЯђаЫШЄЕузљБъЖЈЮЛЗНЗЈ
ЁЁЁЁ2-1ЪеМЏЗНЗЈ : ФцЯђЖЈЮЛЃЌМДгыааНјЗНЯђЯрЗДГЕЕРжЎздНЈзљБъЕФЪеМЏЃЌЕБааЪЛГЕСОППНќЖдЯђ( ЖдЯѓ )ЮяЙ§КѓдМ 3 ЙЋГпЃЌЧсАД 2 ДЮ POI ЪеМЏМќЃЌЯЕЭГЛсПЊЪМЯдЪООрРыЃЌгжгявєЗДЯђздНЈзљБъЦ№ЕуЃЌЕБГЕзгМЬајЭљЧАааЪЛЃЌНгзХЛсПЊЪММЦЫуОрРыжСОЏЪОЦ№ЕужЙЃЌЯЕЭГгявєЁАЗДЯђздНЈзљБъЕу -XX ЁБЯђЃЌДЂДцЭъГЩ ЁБ ЁЃ
ЁЁЁЁ2-2ФцЯђЖЈЮЛВйзїЗНЗЈЃК
ЁЁЁЁ
ЁЁЁЁ2-3аЫШЄЕуЪеМЏзЂвтЪТЯюЃК
ЁЁЁЁA.ЪеМЏздНЈзљБъЪБЃЌШчааЪЛТЗОЖОрРыаЁгкЫйЯоОЏЪООрРыЃЌЯЕЭГЛсГіЯж LES ЃЌЮоЗЈЪеМЏЁЃ
ЁЁЁЁB.ЕБМЧвфЬхвбТњ / ВЛзуЪБЃЌЮоЗЈдйДцДЂЪБЃЌЯЕЭГЛсГіЯж OER ЃЌЧыбЁдёЩОГ§ВЛБивЊЕФздНЈаЫШЄЕузљБъЁЃ(зюДѓДЂДцБЪЪ§ 255 БЪ)
ЁЁЁЁC.АДЯТ POI МќЃЌПЩЫГРћДцДЂздНЈаЫШЄЕуЃЌЭЌВНЯдЪОДЂДцБЪЪ§МАЮЛжУЃЌЕБдйЖШНјШыЯрЭЌЕФздНЈзљБъаЫШЄЕуЧјгђЪБЃЌГ§гявєЬсЪОЭтЃЌ СэгаБЪЪ§ЮЛжУЯдЪОЁЃ
ЁЁЁЁD.вЛУыФкСЌАДЯТ POI Мќ 2 ДЮЃЌЯЕЭГЛсздЖЏМЦЪ§ЫйЯоОЏЪООрРыЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъЦ№ЕуЁБЃЌЭЌЪБЯдЪООрРыЕЙЪ§ЃЌвбДядЄЩшОрРыЪБЃЌгявєЬсЪОЁАЗДЯђздНЈзљБъДЂДцГЩЙІЁБВЂЯдЪО ЕФ ЫГађБрКХЁЃ
ЁЁЁЁE..ФцЯђаЫШЄЕузљБъЖЈЮЛЪеМЏзјБъЕуЪБЃЌааЪЛТЗОЖОЁСПбгжј (зХ) жїИЩЕРааЪЛЮЊжїЃЌЧыЮ№ЮДДяЕНЪеМЏОрРыМДзЊНјШыаЁОЖЃЌЗёдђПЩФмгАЯьЪеМЏЕФОЋШЗадЁЃ
ЁЁЁЁ3 ЁЂздНЈаЫШЄЕуМАЯЕЭГзљБъЯТдигыЩЯДЋЗНЗЈ
ЁЁЁЁ

ЁЁЁЁ5 ЁЂЯЕЭГзљБъИќаТЯТди
ЁЁЁЁгУЛЇЧыЕЧШы http://conqueror.gpscamera.org ЪзУцЃЌВЮеезЂВсМАЯТдиСїГЬЫЕУїЃЌгУЛЇПЩвдЧсЫЩЭИЙ§аТдіЩОГ§зљБъЯЕЭГЃЌЭјТЗзЩбЏЛёЕУИќаТЁЃ
2013Фъ10дТ18Ше
еБп170ЖШ1080P/ЙњМЪЖЅМЖCOMSДЋИаЦї SuntyЩЃЕЯA8ЗжЯэ